

2.4.4 Прямолинейное движение робота с одной точкой опоры по шероховатой поверхности
При прямолинейном движении робота с одной точкой опоры (NA>0, NB=0) сила трения в этой точке равна предельной ( ), , .
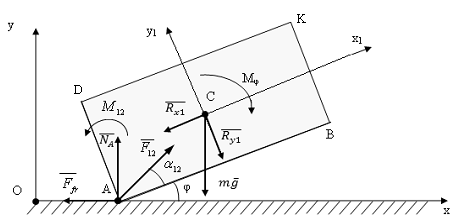
Рис. 6.4 Расчетная схема робота при прямолинейном движении робота с одной точкой опоры
Система уравнений в этом режиме записывается в виде:
![]() (4)
(4)
и требует решения относительно нормальной реакции в точке А и перемещения центра масс корпуса вдоль оси Ох.
Нормальная реакция в точке А равна
![]() .
.
Линейное ускорение центра масс корпуса рассчитывается по формуле:
![]()
Последнее уравнение в системе определяет условие, при котором наблюдается данный режим движения робота:
![]() .
.
2.4.5 Поворот относительно точки а
Рассмотрим случай, когда нормальная реакция в точке А положительна (NA>0, ), нормальная реакция в точке В равна 0 (NB=0) и сила трения в точке А не превышает предельную ( ), т.е. система совершает поворот вокруг точки А.
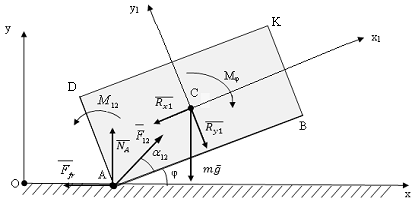
Рис. 6.5 Расчетная схема робота при вращательном движении относительно точки А
Уравнения связи имеют вид:
![]() ,
,
![]()
Система уравнений при вращательном движении корпуса относительно точки А имеет вид:
![]() (5)
(5)
где JA=2m(a2+b2) – момент инерции корпуса робота относительно точки А.
Неизвестными являются нормальная реакция NA и сила трения Ffr в точке А и поворот φ корпуса относительно его центра масс, которые находятся по формулам:
![]() ,
,
![]() ,
,![]() .
.
2.4.6 Плоскопараллельное движение без отрыва от поверхности
При плоскопараллельном движении без отрыва корпуса от поверхности робот имеет одну точку опоры А (NA>0, NB=0), сила трения в которой равна предельной ( ).
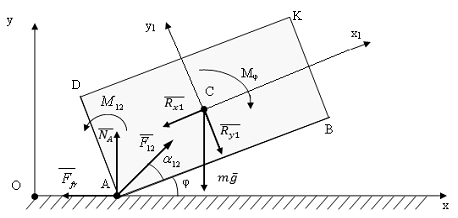
Рис. 6.6 Расчетная схема робота при плоскопараллельном движении
Уравнение связи записывается в виде:
Система уравнений, описывающих плоскопараллельное движение робота без отрыва от поверхности
![]() (6)
(6)
где JC=m(a2+b2), требует решения относительно неизвестных нормальной реакции в точке А и двух обобщенных координат – перемещения центра масс корпуса вдоль оси Ох и угла поворота корпуса.
Нормальная реакция в точке А равна
![]() .
.
Линейное и угловое ускорения центра масс корпуса рассчитываются по формулам:

2.4.7 Плоскопараллельное движение при отрыве от поверхности
После
того, как произошел отрыв обеих точек
опоры корпуса от поверхности (NA
=
0, NB
=
0), но ордината точки А
по оси Оу
не достигла некоторого значения
y*=lsin(α12+φ)
(![]() ),
наблюдается плоскопараллельное движение
корпуса робота под действием силы
F12=F12(t)
и момента M12=M12(t).
),
наблюдается плоскопараллельное движение
корпуса робота под действием силы
F12=F12(t)
и момента M12=M12(t).
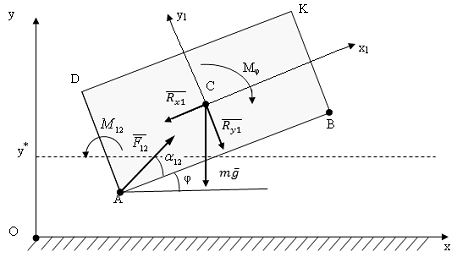
Рис. 6.7 Расчетная схема при плоскопараллельном движении с отрывом от поверхности
Получим систему уравнений, описывающих состояние системы,
![]() (7)
(7)
из которой определим неизвестные обобщенные координаты:
![]()
![]()
![]()
2.5 Алгоритм моделирования одного прыжка робота
Представленный на рис. 6.1 алгоритм позволяет исследовать линейные и угловые характеристики прыгающего робота.
Моделирование
движения робота проводится при нулевых
начальных условиях: t=0,
xC=0,
![]() ,
yC=0,
0,
,
yC=0,
0,
![]() ,
=0,
,
=0,
![]() .
Формирование матрицы результатов
моделирования осуществляется пошагово
при помощи счетчика i,
шаг по времени равен t.
Циклический пересчет характеристик
робота по времени обеспечивает выполнение
условия ti<Tk,
где ti
– время на i-ом
шаге, Tk
– конечное время. Параметры исследуемой
системы: масса корпуса m=5 кг, геометрические
размеры а=0,25
м, b=0,15
м, моменты инерции корпуса относительно
точек С
и А
JC=0,85
кг·м2,
J1=1,7
кг·м2,
коэффициент трения скольжения f=0,2,
момент и сила, создаваемые приводами
М12=30
Нм, F12=500
Н. Движение робота происходит в среде
с нулевыми коэффициентами вязкости:
μx1=
μy1=μφ=0
Н·с/м.
.
Формирование матрицы результатов
моделирования осуществляется пошагово
при помощи счетчика i,
шаг по времени равен t.
Циклический пересчет характеристик
робота по времени обеспечивает выполнение
условия ti<Tk,
где ti
– время на i-ом
шаге, Tk
– конечное время. Параметры исследуемой
системы: масса корпуса m=5 кг, геометрические
размеры а=0,25
м, b=0,15
м, моменты инерции корпуса относительно
точек С
и А
JC=0,85
кг·м2,
J1=1,7
кг·м2,
коэффициент трения скольжения f=0,2,
момент и сила, создаваемые приводами
М12=30
Нм, F12=500
Н. Движение робота происходит в среде
с нулевыми коэффициентами вязкости:
μx1=
μy1=μφ=0
Н·с/м.
Моделирование
движения робота проводится по алгоритму,
приведенному на рис. 7. Определение фазы
прыжка, в которой находится объект,
осуществляется при помощи счетчика n.
Значение n=0
соответствует фазе разгона, которая
заканчивается в момент обнуления
нормальной реакции в стопе робота
![]() ,
счетчик становится равным n=1.
В результате этого робот переходит в
фазу полета, в которой находится до тех
пор, пока не обнулится ордината одной
из опорных точек корпуса робота. При
выполнении указанного условия счетчик
принимает новое значение n=2,
объект переходит в фазу приземления,
которая заканчивается после того, как
вторая точка корпуса станет взаимодействовать
с поверхностью. При этом счетчик
становится равным n=3,
после чего цикл прыжка завершается.
,
счетчик становится равным n=1.
В результате этого робот переходит в
фазу полета, в которой находится до тех
пор, пока не обнулится ордината одной
из опорных точек корпуса робота. При
выполнении указанного условия счетчик
принимает новое значение n=2,
объект переходит в фазу приземления,
которая заканчивается после того, как
вторая точка корпуса станет взаимодействовать
с поверхностью. При этом счетчик
становится равным n=3,
после чего цикл прыжка завершается.
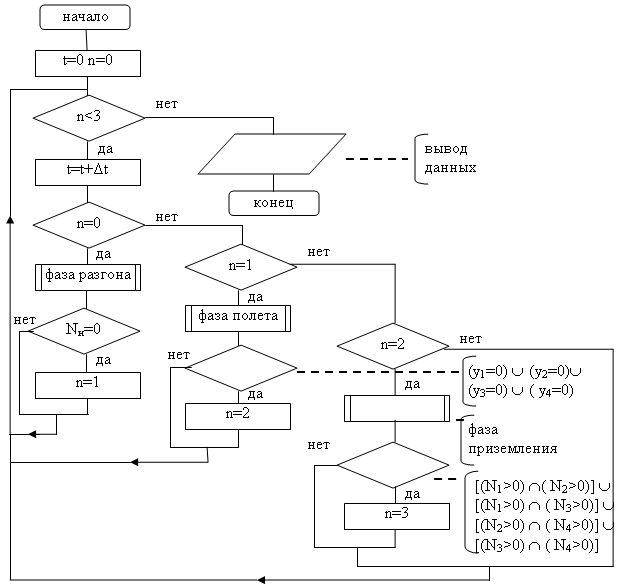
Рис. 7. Алгоритм моделирования одного прыжка робота вместо n писать другую букву и в пояснении алгоритма тоже
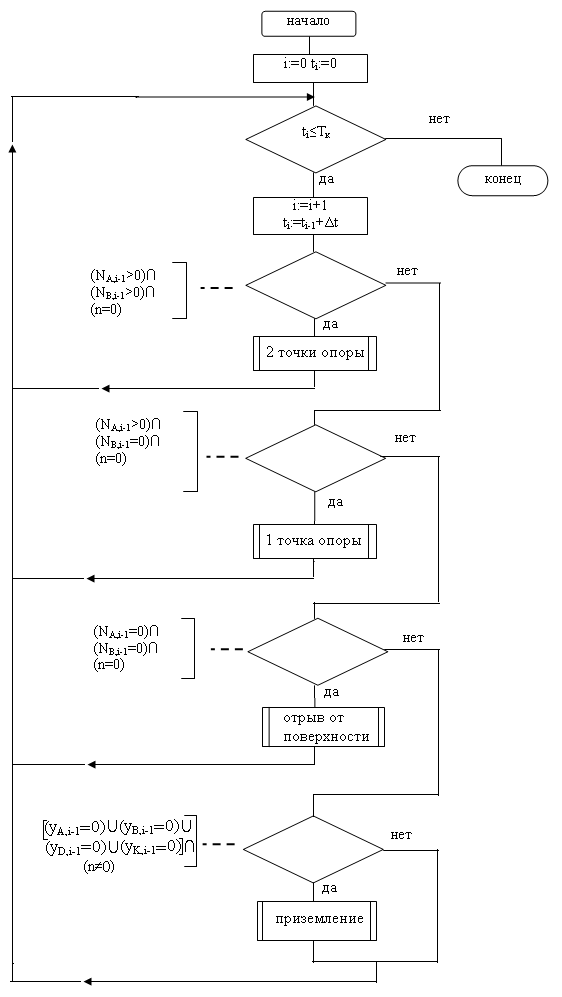
Рис. 6.1 Алгоритм моделирования одного прыжка робота переделать под фазу разгона
В фазе разгона по значениям нормальных реакций определяется число точек корпуса робота, взаимодействующих с поверхностью.
При двух положительных нормальных реакциях (рис. 6.2) робот в соответствии с используемой моделью сухого трения может находиться в трех режимах: статика с двумя точками опоры, если абсцисса скорости центра масс равна нулю и сила трения в опоре А меньше предельной, прямолинейное движение вдоль оси Ох, при ненулевой горизонтальной составляющей скорости центра масс, переход из статического положения на двух опорах к прямолинейному, когда горизонтальная составляющая скорости центра масс равна нулю и сила трения достигла предельного значения.
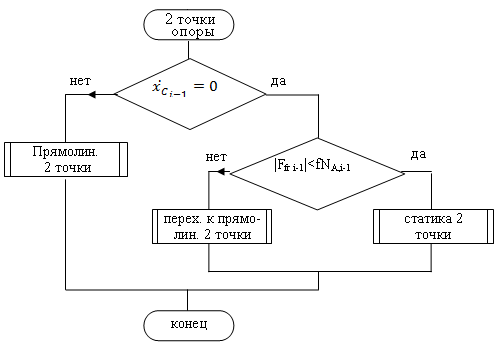
Рис. 6.2 Алгоритм процедуры движения робота с двумя точками опоры в фазе разгона
Если
корпус робота взаимодействует с
поверхностью в одной точке – т. А
(![]() ),
то робот может находиться в следующих
режимах (рис. 6.3). При равенстве нулю
горизонтальной составляющей скорости
точки А
и силе трения меньше предельной робот
либо вращается относительно неподвижной
точки А,
либо находится в состоянии покоя при
одной точке опоры (когда
),
если же сила трения равна предельной,
то наблюдается переход из вращательного
движения в плоскопараллельное без
отрыва от поверхности. Последнее будет
реализовано при ненулевой горизонтальной
проекции скорости точки А,
также возможен режим прямолинейного
движения с одной точкой опоры при нулевой
угловой скорости.
),
то робот может находиться в следующих
режимах (рис. 6.3). При равенстве нулю
горизонтальной составляющей скорости
точки А
и силе трения меньше предельной робот
либо вращается относительно неподвижной
точки А,
либо находится в состоянии покоя при
одной точке опоры (когда
),
если же сила трения равна предельной,
то наблюдается переход из вращательного
движения в плоскопараллельное без
отрыва от поверхности. Последнее будет
реализовано при ненулевой горизонтальной
проекции скорости точки А,
также возможен режим прямолинейного
движения с одной точкой опоры при нулевой
угловой скорости.
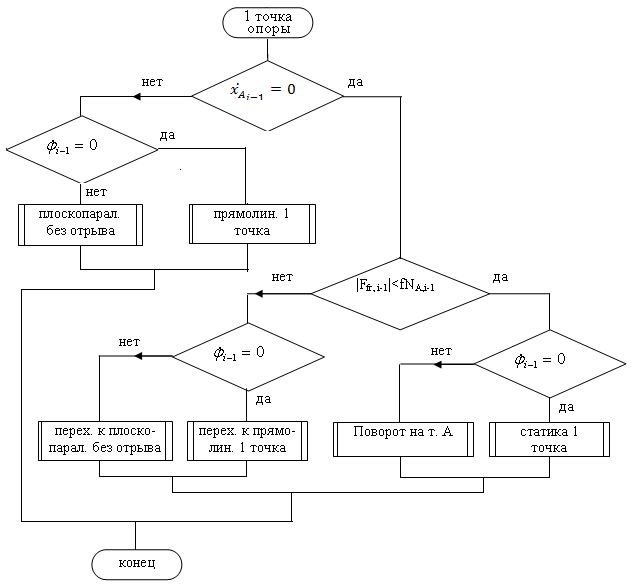
Рис. 6.3 Алгоритм процедуры движения робота с одной точкой опоры в фазе разгона
После
отрыва обеих точек А
и В
от поверхности в зависимости от ординаты
точки А
робот может находиться в фазе разгона
под действием силы F12
(![]() )
или же совершать полет под действием
сил инерции и тяжести при невыполнении
указанного условия (рис. 6.4).
)
или же совершать полет под действием
сил инерции и тяжести при невыполнении
указанного условия (рис. 6.4).
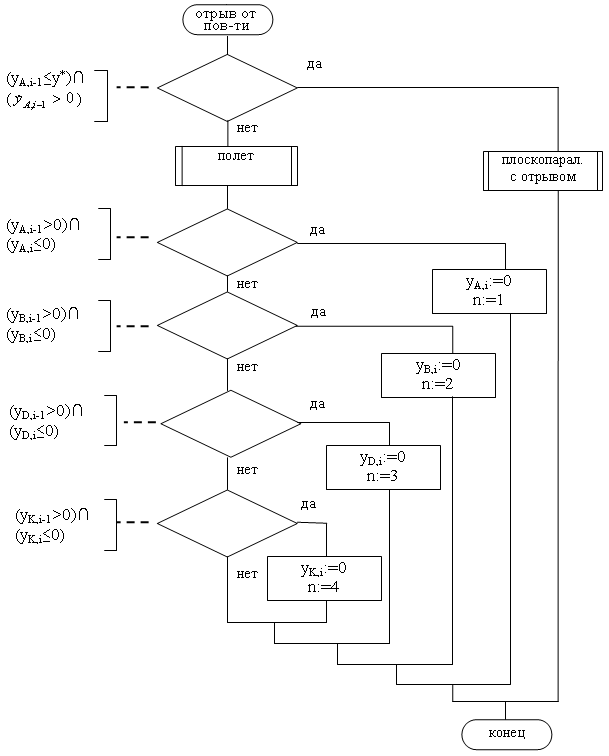
Рис. 5.4 Алгоритм процедуры движения робота при отрыве от поверхности
Как только ордината одной из точек корпуса обнулится, начинается режим приземления, в котором корпус поворачивается относительно неподвижной точки приземления до тех пор, пока вторая точка не окажется на поверхности и робот не перейдет в статическое положение с двумя точками опоры (рис. 6.5). На рис. 6.6 рассмотрен алгоритм приземления робота на точку А.
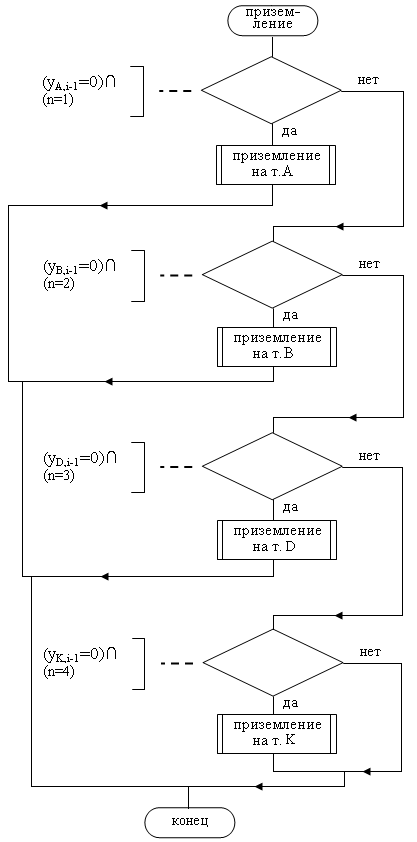
Рис. 6.5 Алгоритм процедуры приземления робота
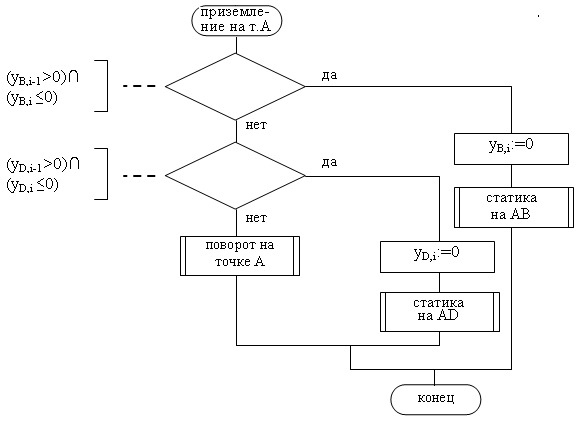
Рис. 6.6 Алгоритм процедуры приземления робота на точку А