

4.1. Методы радионавигационных измерений
В принципе, в СРНС можно пользоваться всеми методами измерений, применяемыми в радионавигации с помощью наземных РНТ: угломерным, угломерно-дальномерным, дальномерным, разностно-дальномерным. Однако практически все методы, связанные с использованием угловых координат, исключаются, так как при больших расстояниях между ВС и ИСЗ они приводят к низкой точности определения местоположения ВС.
Наибольшую точность обеспечивают дальномерные системы. Несмотря на значительное удаление ВС от ИСЗ, погрешность измерений дальности удается доводить до 10 м.
Дальномерный метод
определения местоположения ВС основан
на измерении либо трёх дальностей
![]() (i=1, 2,3) ВС до трех точек
(рис. 3), либо двух дальностей и высоты Н
(рис. ) в один и тот же момент времени. В
этом случае координаты ВС x,
y,z
определяются в результате решения трех
навигационных уравнений вида
(i=1, 2,3) ВС до трех точек
(рис. 3), либо двух дальностей и высоты Н
(рис. ) в один и тот же момент времени. В
этом случае координаты ВС x,
y,z
определяются в результате решения трех
навигационных уравнений вида
![]()
где
![]() -
известные координаты НИСЗ.
-
известные координаты НИСЗ.
Поверхностями положения являются три сферы радиуса центры, которых расположены в точках, где находятся НИСЗ в момент выполнения измерений, а при использовании информации о высоте полета центр соответствующей сферы совпадает с центром Земли. Пространственное положение ВС находится в результате пересечения трех сферических поверхностей положения.
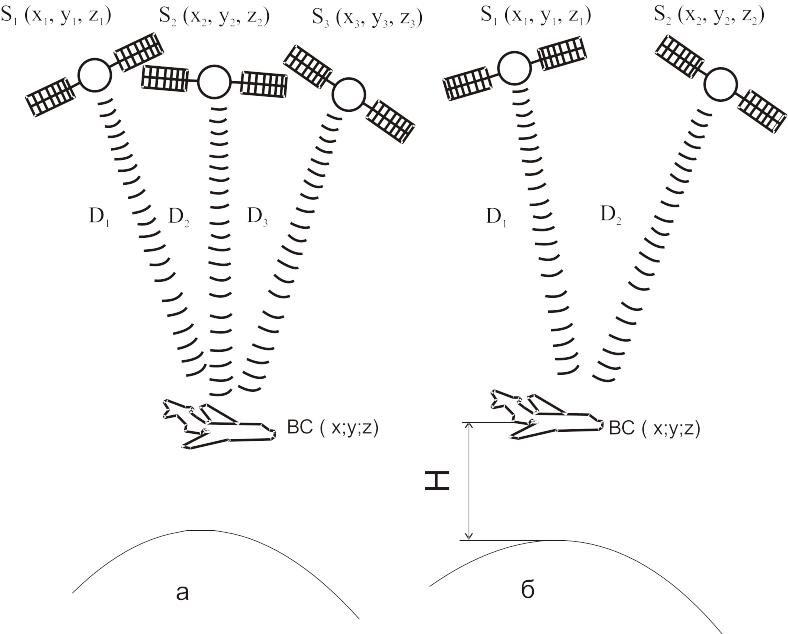
Рисунок 4.3. К определению местоположения ВС дальномерным методом
Таким образом,
навигационные уравнения устанавливают
связь результатов измерения с координатами
положения НИСЗ и ВС в прямоугольной
геоцентрической системе координат Ох,
у, z. Здесь плоскость хОу совмещена
с плоскостью экватора, а ось х
направлена в сторону гринвичского
меридиана. При необходимости геоцентрические
прямоугольные координаты могут быть
пересчитаны в любые другие, в том числе
и в частно ортодромические для
автоматизированного вождения ВС. В
гражданской авиации в большинстве
случаев не требуется определять все
три координаты по данным измерений с
помощью НИСЗ, так как одна из них - высота
Н - измеряется непосредственно
бортовыми высотомерами. Две остальные
координаты х, у (или
![]() )
определяются по двум дальностям.
Следовательно, для нахождения
местоположения ВС достаточно использовать
два уравнения вида
)
определяются по двум дальностям.
Следовательно, для нахождения
местоположения ВС достаточно использовать
два уравнения вида
![]() ,
дополнив их уравнением, отображающем
результаты измерения высоты полета:
,
дополнив их уравнением, отображающем
результаты измерения высоты полета:
![]()
где радиус Земли.
В практике
современного самолетовождения на борту
ВС имеются, как правило, счисленные
координаты
![]() .
В этом случае СРНС целесообразно
использовать для коррекции счисленных
координат, т. е. для определения поправок
.
В этом случае СРНС целесообразно
использовать для коррекции счисленных
координат, т. е. для определения поправок
![]() .
При этом фактические – координаты ВС:
.
При этом фактические – координаты ВС:
![]()
При дальномерном методе определения координат ВС может использоваться как пассивный (беззапросный), так и активный (запрос - ответ) режим работы бортового оборудования ВС. Дальномерным системам при запросном способе измерения дальности свойственна ограниченная пропускная способность ответчика НИСЗ. Однако в СРНС, работающих по запросно-ответному принципу, координаты ВС определяются без систематических ошибок. Для пассивных дальномерных систем координаты ВС определяются со случайными и систематическими ошибками, обусловленными рассогласованием шкал времени на НИСЗ и ВС за счет нестабильности эталонных генераторов. Однако синхронизация часов на ВС и НИСЗ прёдполагает точное определение координат ВС. Часы ВС синхронизируются по спутниковым часам в процессе навигационных измерений. Наиболее успешно эта задача решается при использовании дальномерных методов беззапросного типа, отличительной особенностью которых является то обстоятельство, что они реализуются в условиях, когда уход часов на борту ВС весьма значителен и игнорировать его нельзя.
Разностно-дальномерные методы с точки зрения технической реализации сходны с дальномерными. Существенные достоинства спутниковых разностно-дальномерных систем заключаются в их неограниченной пропускной способности и простоте бортовой аппаратуры ВС (обусловленной отсутствием радиопередатчика). Использование разностно-дальномерных систем не требует излучения сигналов с борта ВС и не демаскирует его. Однако по своим точностным характеристикам разностно-дальномерные системы несколько уступают дальномерным. Кроме того, при реализации разностно-дальномерных методов для получения одной поверхности положения необходимо использовать две спутниковые радионавигационные точки, поэтому число спутников в зоне видимости ВС при разностно-дальномерных измерениях должно быть на единицу больше числа спутников при дальномерных измерениях.
Непременным
условием точного определения параметров
движения ВС с помощью НИСЗ является
точная привязка результатов измерения
дальности или разности дальностей ко
времени. На Земле, на борту ИСЗ и борту
ЛА необходимо иметь высокоточные часы,
обеспечивающие формирование местных
шкал времени, согласованных между собой
и хорошо воспроизводящих истинное
время. Из-за расхождения шкал часов НИСЗ
и ЛА временные интервалы между моментами
излучения зондирующих сигналов с борта
ИСЗ и моментом их приема на ВС измеряются
с погрешностью
![]() и, следовательно, возникает
и, следовательно, возникает
![]() .
.
Поэтому измеряемые
значения дальности
![]() будут отличаться от истинных
будут отличаться от истинных
![]() на величину
на величину
![]() :
:
![]()
где
- псевдодальность (квазидальность);
![]() - расхождение шкал времени на борту ВС
и НИСЗ.
- расхождение шкал времени на борту ВС
и НИСЗ.
Псевдодальномерный (квазидальномерный) - метод - это дальномерный метод беззапросного типа, реализуемый в условиях, когда синхронизированы временные шкалы всех спутников, а между шкалами времени на НИСЗ и ВС имеется расхождение на неизвестную, но постоянную за время определения навигационных параметров величину . Постоянство предполагает стабильность бортового генератора ВС только на интервале навигационных измерений, при этом эталонные генераторы всех опорных радионавигационных точек должны быть синхронизированы со шкалой единого времени. Другими словами, при реализации псевдодальномерного метода на борту ВС необходимо иметь информацию о поправке к бортовой шкале времени.
Поскольку в данном
случае имеются уже четыре неизвестных
величины
![]() то для их определения необходимо решить
системе из четырех навигационных
уравнений:
то для их определения необходимо решить
системе из четырех навигационных
уравнений:
![]() ,
,
где - постоянный сдвиг по дальности из-за отклонения шкалы бортового времени ВС относительно шкалы единого времени НИСЗ; с - скорость света.
Псевдодальномерный
метод основан, таким образом, на измерении
четырех псевдодальностей
![]() ВС до четырех НИСЗ либо трех псевдодальностей
и высоты полета ВС. В спутниковых системах
с псевдодальномерным методом процедура
измерений и обработки информации
строится, таким образом, что6ы можно
было определять не только параметры
движения, но и поправку к бортовой шкале
времени ВС.
ВС до четырех НИСЗ либо трех псевдодальностей
и высоты полета ВС. В спутниковых системах
с псевдодальномерным методом процедура
измерений и обработки информации
строится, таким образом, что6ы можно
было определять не только параметры
движения, но и поправку к бортовой шкале
времени ВС.
Основной элемент всяких часов - генератор колебаний, стабильность колебаний которого определяет точность их хода, Так как стабильность частоты реально используемых: генераторов, ограничена, возникает потребность в периодической сверке и коррекции бортовых часов по более точным часам, используемым на Земле, а наземных часов - по часам общегосударственной службы времени. Периодичность сверки определяется степенью стабильности часов.
Если в спутниковых системах навигации координаты ВС определяются псевдодальномерным методом, то синхронизация часов осуществляется следующим образом.
Сначала по наземной
шкале времени, отличающейся наиболее
высокой точностью
![]() обеспечивается синхронизация часов,
устанавливаемых на навигационных ИСЗ,
и формируется спутниковая шкала времени.
Время, отсчитывающее по спутниковой
шкале, называется системным временем.
На борту НИСЗ системное время хранится
эталонами частоты высокой точности
обеспечивается синхронизация часов,
устанавливаемых на навигационных ИСЗ,
и формируется спутниковая шкала времени.
Время, отсчитывающее по спутниковой
шкале, называется системным временем.
На борту НИСЗ системное время хранится
эталонами частоты высокой точности
![]() .
.
Часы ВС синхронизируются по спутниковым часам в процессе навигационных измерений. При этом вводится поправка на время распространения сигналов точного времени от одной точки до другой. Например, если расстояние от центра управления (по часам центра синхронизируются часы НИСЗ) до НИСЗ равно 30000 км и столько же от НИСЗ до ВС, то при передаче сигналов точного времени с Земли до ВС через спутник запаздывание составляет 0,2 с, которое необходимо учесть.
В современных СРНС эталоны времени НИСЗ обладают настолько высокой стабильностью, что вносимой ими погрешностью можно пренебречь.
Таким образом, точность определения навигационных параметров ВС при измерениях по ИСЗ определяется точностью данных о параметрах движения ИСЗ, точностью радиотехнических измерений и геометрическими условиями наблюдения. В свою очередь, точность данных о параметрах движения ИСЗ зависит от точности определения орбиты и прогнозирования.