

Вопрос №5.
3. Аппаратура автоматизированных рабочих мест (Рис.3).

Рис. 3
5 автоматизированных рабочих мест (АРМ-1…АРМ-5),
устройство сопряжения с рабочими местами (УСРМ), в котором расположены 5 блоков генератора знаков (БГЗ);
Аппаратура АРМ предназначена для:
отображения первичной РЛИ и вторичной табличной и координатно-знаковой информации с возможностью выполнения необходимых селекций;
ввода команд управления обработкой первичной информации и
ввода команд управления СРЛ и наземными радиозапросчиками (НРЗ) систем опознавания.
Четыре автоматизированных рабочих места АРМ-1…АРМ-4 взаимозаменяемы. За ними работают операторы сопровождения и командир роты (АРМ-2). Автоматизированное рабочее место АРМ-5 предназначено для работы с двумя высотомерами в режиме «Дальность - угол места».
- Пульт контроля и управления (ПКУ-П) Рис.4.
ПКУ-П предназначен для управления режимами работы отдельных устройств КСА, организации инженерных вводов и контроля за работой аппаратуры комплекса.

Вопрос №6-7.
КСА 86Ж6 обеспечивает прием информации от РЛС и ее обработку.
Все типы РЛС, сопрягаемые с КСА 86Ж6 можно разделить на 2 группы:
- 3-х координатные РЛС, типа 19Ж6, 35Д6, 22Ж6, имеющие собственные устройства первичной обработки РЛИ (СПОИ) и способные передавать РЛИ на КСА в цифровой форме;
- все остальные РЛС - 2-х координатные РЛС или так называемые "РЛС старого парка".
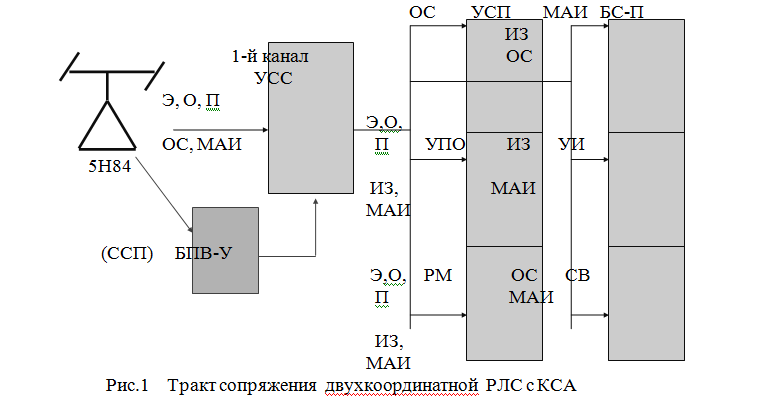
В первом вопросе лекции рассмотрим тракты сопряжения с РЛС второй группы. Дадим краткую характеристику сопряжению с ними.
РЛС и КСА обмениваются следующими группами сигналов:
1. Аналоговые сигналы:
- видеосигналы (Э,П,ОП,Н-П, К-П).
- синхронизирующие сигналы (ИЗ, МАИ, ОС).
Каждый из этих сигналов передается от РЛС на КСА по отдельному РК кабелю (ВЧ).
Некоторые РЛС не имеют датчиков МАИ и ОС (1РЛ134, 5Н84), поэтому вместо синхронизирующих импульсов передаются напряжения ССП.
Кроме этого координатные РЛС не имеют собственного УПО, поэтому для реализации режима АС используется УПО КСА.
Видео- и синхросигналы поступают на УСС КСА 86Ж6.
УСС - представляет собой 6-канальное устройство для приема, усиления, коммутации и распределения аналоговых сигналов. Каналы УСС неравнозначны:
1. 55Ж6, 5Н84 (А)
2. 19Ж6, 1РЛ141 кр.
3. Резервный.
4. 35Н6, 1РЛ134, 5У75.
5-6. 1РЛ130, 1РЛ141.
Выбор канала УСС, подключаемого к РМ осуществляет оператор нажимая на ПУ РМ клавиши 1...4.
Вопрос №8.
2.3 Полуавтоматический захват.
1-й обзор. Оператор обнаруживает отметку, совмещает маркер с ее центром и на ПВ АРМ нажимает клавиши "1 ввод! и "ввод". На индикаторе отобразится квитанция от СВ “П”- принято, “О” - отказ. Измеренные координаты в кодограмме поступают в СВ.
2-й обзор. На индикаторе отобразится формуляр 1-го ввода, но 1-й знак будет в кружке - признак полуавтоматического захвата. На втором обзоре оператор совмещает маркер с "переместившейся" отметкой ВО и нажимает на ПВ АРМ клавишу "ввод".
ВО считается захваченным на сопровождение при выполнении критерия 2/5 ( в 2-х обзорах из 5 появились отметки). Кроме того, в КСА стоит временной критерий - 45 сек.
После второго ввода координат ВО автоматически на каждом обзоре РЛС включается НРЗ в секторе ЭТ ВО, пока оператор не введет признак (совместно с вводом координат ВО), т.к. изначально присваивается "неопознан" или "чужой".