

7.3. Режим «Полёт На»
Одной из отличительных особенностей и важным преимуществом спутниковой навигации является способ выбора ЛЗП путём задания точки маршрута WPT с известными заранее географическими координатами и возможность полёта по ортодромии в соответствии с принципом «DIRECT TO» (полёт прямо на выбранную точку). Этому способу не свойственны недостатки угломерных навигационных систем, таких как приводные радиомаяки NDB и VOR-маяки, в которых осуществляется полёт «На» или «От» наземного маяка, а ЛЗП определяется заданным путевым углом. Эти системы имеют значительные погрешности при определении угловых координат, вызванные переотражением радиоволн, а полёт должен осуществляться по заранее определенным воздушным трассам, в поворотных пунктах которых должны быть расположены наземные радиомаяки. При этом самолётовождение с высокой точностью по спрямлённым траекториям над незаселённой территорией невозможно.
В
Рис. 7.9.
Диалоговое окно режима
«DIRECT
TO» на дисплее MFD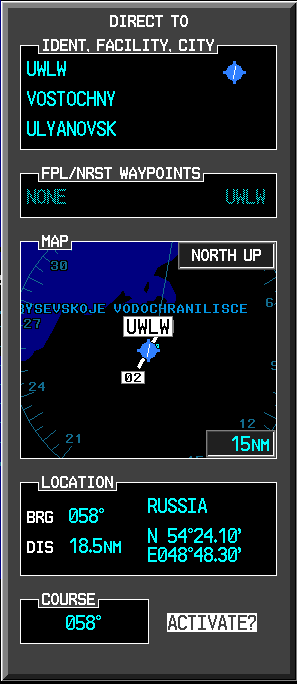
Выбор точки маршрута WPT производится из базы аэронавигационных данных. Могут быть выбраны и точки, созданные пользователем – «USER WPT». Выбор производится с помощью ручек FMS после включения функции курсора нажатием малой внутренней ручки. Поворотом малой ручки производится выбор очередных букв и цифр идентификатора точки маршрута, а поворотом большой ручки производится перемещение курсора. Процесс завершается активацией выбранной точки нажатием клавиши ENT с подтверждением выбора повторным её нажатием. Если был активирован флайт-план, то в качестве точки маршрута для осуществления режима «DIRECT TO» автоматически представляется очередная точка активного участка маршрута из флайт-плана.
В
Рис. 7.10.
Диалоговое окно режима
«DIRECT
TO» на дисплее PFD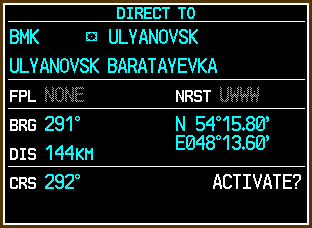
В качестве целевой точки маршрута при использовании режима «DIRECT TO» может быть ближайший аэродром NEAREST AIRPORT, пересечение INT, NDB или VOR-маяк. Для этого нужно открыть страницу «NRST», выбрать ближайшую целевую точку для полёта в режиме «DIRECT TO» и нажать клавишу . Кроме того, целевую точку для полёта в режиме «DIRECT TO» можно выбрать, используя ручку-кнопку (Joystick) на правой панели дисплея MFD. При нажатии (Push PAN) и отклонении данной ручки в указанном стрелками направлении производится перемещение курсора карты (Map Cursor) в этом направлении. При совмещении этого курсора с предполагаемой целевой точкой, её название или идентификатор подсвечивается. Дальнейшее нажатие клавиши открывает диалоговое окно режима «DIRECT TO» с этой выбранной точкой. Вычислитель комплекса Garmin G 1000 рассчитывает ЛЗП (здесь ортодромию) от текущего места самолёта в момент активации режима «DIRECT TO» до выбранной точки маршрута и представляет её на изображении навигационной карты в виде прямой линии пурпурного цвета. Эта ЛЗП может использоваться автопилотом GFC 700 в режиме «NAV» при использовании системы GPS в качестве навигационного источника.
При необходимости отказа от использования режима «DIRECT TO» для навигации необходимо нажать клавишу , а затем клавишу MENU. Появится окно «PAGE MENU» с единственной опцией «Cancel Direct-To NAV». Нажатие клавиши ENT приведёт к закрытию окон и завершению режима «DIRECT TO».