

Виды высот полета
Высотой полета называют измеренное по вертикали расстояние между ВС и некоторой поверхностью, принятой за начало отсчета.
При полетах самолетов различают четыре основных вида высот (рис.9.4):
абсолютная высота (Набс.) – высота полета относительно уровня моря (pо = 760 мм.рт.ст.);
относительная высота (Нотн.) – высота полета относительно места взлета или посадки;
истинная высота (Н) – высота полета относительно места, над которым находится самолет в данный момент времени;
барометрическая высота (Нбар.) – высота полета относительно места с заданным атмосферным давлением.
Знание абсолютной высоты необходимо при эшелонировании, испытательных полетах ВС и авиационных двигателей, относительная высота должна быть известна при взлете и посадке, а истинная высота – во всех случаях полета.
ИУ, предназначенные для измерения высоты полета самолета над земной поверхностью, называются высотомерами.

Рис. 9.4. Виды высот полета
На больших ВС применяют комплексы высотно-скоростных параметров, которые предназначены для обслуживания нескольких бортовых систем – автопилотов, навигационных систем и комплексов, дистанционных указателей и т.д. В таких комплексах, обычно, конструктивно объединяют датчики высоты полета с датчиками скорости и числа М.
Методы измерения высоты полета
Известны следующие методы измерения высоты полета: барометрический, радиотехнический, инерциальный, ионизационный и т.д.
Барометрический метод основан на зависимости между абсолютным давлением в атмосфере и высотой. В этом методе измерение высоты сводится к измерению абсолютного давления с помощью барометра.
Радиотехнический
метод
определения высоты основан на измерении
промежутка времени прохождения
радиосигналом пути от самолета до земли
и обратно до самолета. На этом же принципе измерения времени
прохождения отраженным лучом основаны
оптические методы измерения высоты.
этом же принципе измерения времени
прохождения отраженным лучом основаны
оптические методы измерения высоты.
Инерциальный метод измерения высоты полета основан на измерении вертикальных ускорений самолета и двойном интегрировании этих сигналов.
Ионизационный метод измерения высоты полета основан на зависимости ионосферной ионизации атмосферы от расстояния до Земли.
На высотах 20 – 80 км степень ионизации воздуха возрастает с увеличением высоты.
Наибольшее распространение получили барометрический и радиотехнический методы. Перспективными являются приборы, основанные на комплексировании барометрического, радиотехнического и инерционного методов измерения высоты.
Барометрический метод измерения высоты полета базируется на зависимости абсолютного давления р от высоты Н, т. е. p = f1(H).
При увеличении высоты атмосферное давление уменьшается. До высоты Н=11000 м оно изменяется по следующему закону, подтверждаемому многолетними наблюдениями:
![]()
где Ро, То – средние значения давления и температуры, применяемые равными:
Ро = 760 мм. рт. ст.;
То = 15о С (288о К);
τ = 6,5 10-3 град/м – температурный градиент;
R = 29,27 м/град – газовая постоянная.
Эта формула называется стандартной барометрической, т.к. устанавливает зависимость p = f(H) для стандартной атмосферы, характеризуемой постоянными значениями Ро, То, τ и R. Если эту зависимость решить относительно Н, то получается формула, называемая гипсометрической:

Эти две зависимости справедливы до высоты 11 км. Для высот более 11 км при выводе барометрической и гипсометрической формул температура воздуха считается постоянной и равной Т = 216,66о К (– 56,6о С), т.е. τ = 0. Стандартные барометрическая и гипсометрическая формулы для Н > 11 км принимают вид
![]()
![]()
На высотах от 11 до 33 км средняя температура остается неизменной, а на Н > 33 км, начинает резко возрастать, и указанные формулы становятся неточными.
Радиотехнический метод измерения высоты полета (называют также радиоволновым или радиолокационным) основан на отражении радиоволн от земной поверхности. Устройства, построенные по этому принципу, измеряют истинную высоту полета и называются радиовысотомерами.
Различают радиовысотомеры непрерывного и импульсного действия (рис. 9.5,а и б).
Блок-схема радиовысотомера непрерывного действия приведена на рис. 9.5, а. Антенна А1 радиопередатчика, установленного на самолете, непрерывно излучает электромагнитные волны, которые, отражаясь от земной поверхности, возвращаются к самолету. Антенна А2 радиоприемника, также находящегося на самолете, принимает как излучаемые антенной А1, так и отраженные от Земли радиоволны.
Особенностью радиовысотомеров непрерывного излучения является частотная модуляция излучаемых колебаний.
На рис. 9.7 приведен график изменения во времени частоты f1 излучаемых колебаний (сплошная линия) и частоты f2 отраженных колебаний (пунктирная линия).
Линия частот f2 сдвинута в сторону отставания относительно линии частот f1 на величину τ вследствие того, что в каждый момент времени частота отраженного сигнала отличается от частоты прямого сигнала на величину, равную изменению частоты прямого излучения за время т прохождения радиоволн от самолета до Земли и обратно.


Рис. 9.5. Блок-схема радиовысотомеров:
а) – непрерывного действия; б) – импульсного действия
Следовательно,
![]()
где t1 – время прохождения радиоволн прямого излучения отантенны передатчика до приемной антенны; t2 – время прохождения радиоволн от передатчика до Земли и обратно до приемной антенны.
В соответствии с рис. 9.6

где l – расстояние между передающей и приемной антенной;
Н – истинная высота полета;
с = 3·108 м/сек – скорость распространения радиоволн.
Отсюда, получаем:
![]()
Разность частот F = f1 – f2, выделяемая в детекторе низкой частоты и измеряемая частотомером, служит мерой истинной высоты полета.

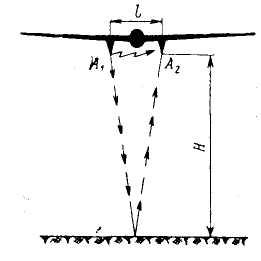
Рис. 9.7. График
изменения частоты колебаний в
радиовысотомере непрерывного излучения
а – зависимость
частот f1
и
f2
от
времени; б – зависимость разности
частот от времени
Рис. 9.6. Схема прохождения прямых
и отраженных радиоволн
Для определения зависимости F от Н запишем уравнение отрезков ломаных линий, характеризующих закон измерения частот f1 и f2 (см. рис.9.7)
![]()
Разность частот
![]()
Поскольку Н >> l, то можно пренебречь в числителе l , по сравнению с 2Н, и тогда
![]()
Чувствительность тем больше, чем больше среднее значение частоты fо и чем больше коэффициент а, характеризующий глубину модуляции частоты.
Величина среднего значения частоты равна fо = 400 ÷ 600 МГц, а амплитуда изменения частоты равна ±0,5% от среднего значения при диапазоне измеряемых высот от 0 до 1500 м.
При посадке самолета прибор переключается на малый диапазон (от 0 до 150 м), при этом амплитуда модуляции частоты увеличивается в 10 раз – до ±5% от среднего значения частоты.
К основным погрешностям радиовысотомера непрерывного действия относятся:
а) погрешности от помех приемопередающего радиотракта, искажающие принимаемый сигнал;
б) погрешности от нестабильности параметров f 0 и а, вызывающие изменение чувствительности S, а следовательно, и масштаб измерения.
С увеличением высоты полета мощность отраженного сигнала резко падает, и он становится трудноразличимым на фоне радиопомех
Интенсивность полезного сигнала можно увеличить за счет повышения мощности радиопередатчика, однако его потребная мощность увеличивается пропорционально 4-й степени увеличения высоты. Например, для увеличения диапазона радиовысотомера непрерывного изучения с 1500 до 15000 м, мощность радиопередатчика пришлось бы увеличить в 10000 раз.
Измерение больших высот полета осуществляется радиовысотомером импульсного действия, работающего как радиолокатор. Радиовысотомер (см. рис. 9.5,б) содержит приемник и передатчик, причем излучение радиоволн производится не непрерывно, а дискретно (импульсами), в течение очень коротких интервалов времени, разделенных значительно более длительными паузами.
Соотношение между мгновенной мощностью РИМП, излучаемой в пространстве в импульсе и средней мощностью РСР передатчика равно
![]()
где Т – период между импульсами;
τО – длительность импульса.
Если, например, Т=1 м/сек, а τО = 1 мксек, то Т/ τО = 1000 и, следовательно, мгновенная мощность в импульсе будет в 1000 раз превышать среднюю мощность радиопередатчика.
Процесс измерения высоты радиовысотомером импульсного действия сводится к следующему. Приемная антенна принимает два последовательных импульса – прямой и отраженный от Земли. Оба импульса усиливаются и подаются на катодно-лучевую трубку, где воздействуют на электронный луч с круговой разверткой.
Если движение луча по окружности от нулевой отметки шкалы будет начинаться в момент времени прихода прямого импульса, а во время прихода отраженного импульса электронный луч получит радиальный всплеск, то угловое положение α этого всплеска будет пропорциональным измеряемой высоте:
![]()
где
S
=
![]() – чувствительность
прибора;
– чувствительность
прибора;
Ω – угловая скорость развертки электронного луча.
Чувствительность S и соответственно точность отсчета показаний можно увеличить путем увеличения скорости развертки Ω. Однако при слишком большой скорости луч может совершить несколько оборотов до момента прихода отраженного импульса и возникнет неопределенность показаний, связанная с незнанием количества оборотов, сделанных лучом.
Получение однозначных показаний достигается переключением диапазонов: при малой скорости развертки производится грубый отсчет высоты, а при большой скорости делается точный отсчет.
Погрешности радиовысотомеров импульсного действия складываются из погрешностей от радиопомех и погрешностей от непостоянства угловой скорости развертки.
Радиовысотомер импульсного изучения непригоден для отсчета очень малых высот (при посадке самолета), так как он обладает сравнительно большой зоной нечувствительности, обусловленной тем, что на малых высотах время τ соизмеримо с длительностью импульса τО, из-за чего прямой и отраженный импульсы сливаются и их не удается различить друг от друга.