4. Расчет механических систем, приведение действующих нагрузок к валу электродвигателя. Приведение моментов сопротивления к валу электродвигателя.
В большинстве ЭМС электродвигатель приводит в действие производственный механизм через систему передач, элементы которой могут осуществлять как вращательные так и поступательные движения, с момент сопротивления приложенный к производственному механизму.
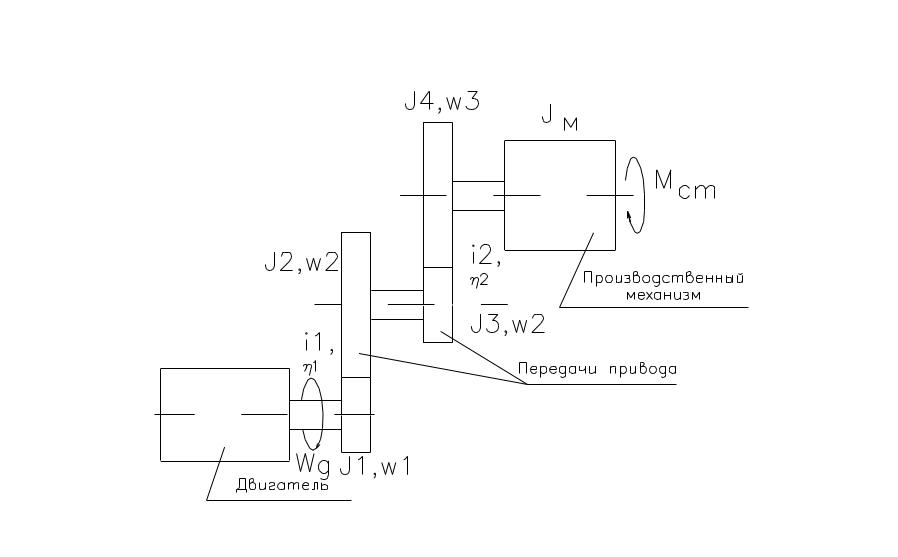
Рис.1
В процессе приведения необходимо определить такой момент Мс, который приложен к валу двигателя оказывает на систему такое же действие как и момент Мсм, приложенный к производственному механизму этот момент и называется приведенным.
Приведение моментов сопротивления выполняется на основании уравнения энергетического баланса: мощность, передаваемая всем элементам системы, с учетом КПД, остается неизменной.
![]() ,
где
,
где
![]() -
КПД всего механизма
-
КПД всего механизма
![]()
![]()
![]()
Приведение Сил сопротивления к валу электродвигателя.
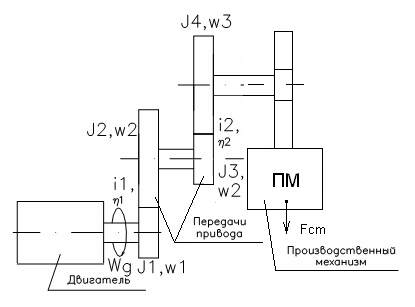
Рис. 2
![]()
![]()
Для приведения вращательного движения в поступательное уравнение записывается в виде:
![]()
![]()
Fc – приведенная сила
Uд – скорость выходного элемента двигателя
Приведение моментов инерции и масс к валу двигателя.
Привеление моментов
инерции к валу двигателя осуществляется
на том основании, что
![]() запас
кинематической энергии, отнесенный к
одной оси, остается неизменным.
запас
кинематической энергии, отнесенный к
одной оси, остается неизменным.
Ii – момент инерции передач системы
Im – момент инерции производственного механизма
Целью приведения является нахождении такого момента инерции, который будучи соединенным с валом двигателя, оказывает на системы такое же действие как и различные элементы системы вращающиеся с различной скоростью.
 - для поступательного
- для поступательного

![]()
Если часть элементов системы вращается с одинаковыми скоростями, то эти элементы объедены в группы. Так для рис.1 приведен момент инерции
Если часть элементов
системы совершает поступательные
перемещения, то доп.
![]()
Если производственный механизм совершает поступательный перемещения, то
![]()
Если двигатель совершает поступательные перемещения, а производственный механизм вращается, то находится приведенная масса
![]()
m – приведенная масса
mg – масса подвижных частей двигателя
5. Моделирование динамики разомкнутой системы
Динамика электродвигателя постоянного тока полностью описывается системой двух уравнений, первое из которых является основным уравнением двигателей постоянного тока и описывает переходные процессы в электрических цепях электродвигателя, а второе уравнение описывает механическую систему электродвигателя и построено на основании второго закона Ньютона для вращательного движения.
![]() (1)
(1)
![]() (2)
(2)
где U- напряжение,
приложенное к якорной цепи; E-э.д.с.
двигателя;![]() -активное сопротивление, ток и индуктивность
якорной цепи;
-активное сопротивление, ток и индуктивность
якорной цепи;
![]() -
активный момент двигателя и момент
сопротивления, приведенный к валу
двигателя;
-
активный момент двигателя и момент
сопротивления, приведенный к валу
двигателя;
![]() -круговая
частота вращения якоря двигателя, J
– момент инерции всех элементов системы,
приведенный к валу электродвигателя.
-круговая
частота вращения якоря двигателя, J
– момент инерции всех элементов системы,
приведенный к валу электродвигателя.
Э.д.с. двигателя пропорциональна частоте вращения
, (3)
где c![]() -
конструктивный коэффициент двигателя,
Ф- магнитный поток возбуждения, n- частота
вращения в об/мин, c- коэффициент
пропорциональности.
-
конструктивный коэффициент двигателя,
Ф- магнитный поток возбуждения, n- частота
вращения в об/мин, c- коэффициент
пропорциональности.
Активный момент двигателя пропорционален току якоря
![]() , (4)
, (4)
где
![]() -
конструктивный коэффициент.
-
конструктивный коэффициент.
Коэффициент пропорциональности c может быть определен из формулы
![]()
![]()
где
![]() -номинальная
круговая частота вращения,
-номинальная
круговая частота вращения,
![]() -
частота вращения в об/мин,
-
частота вращения в об/мин,
![]() -
номинальное напряжение ,
-
номинальное напряжение ,
![]() -номинальный
ток якоря.
-номинальный
ток якоря.
Иногда в таблицах
справочных данных отсутствует одно из
значений
![]() либо
либо
![]() ,
тогда недостающую величину можно оценить
из следующих соображений:
,
тогда недостающую величину можно оценить
из следующих соображений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Индуктивность якорной цепи может быть приближенно определена по формуле
![]()
где
![]() -
коэффициент, равный 0,6 для двигателей
без компенсационной обмотки и равный
0,25 для двигателей с компенсационной
обмоткой, p- число пар полюсов двигателя.
-
коэффициент, равный 0,6 для двигателей
без компенсационной обмотки и равный
0,25 для двигателей с компенсационной
обмоткой, p- число пар полюсов двигателя.
Напишем уравнения (1) и (2) таким образом, чтобы производные тока и скорости находились в левой части
![]() ;
;
![]() или
или
![]() ;
;
![]() .
.
Моделирование
динамики электродвигателя с приведенными
нагрузками осуществляется по алгоритму,
представленному на рис.2 , где n
- счетчик циклов, z
- количество циклов, через которое
осуществляется печать,
![]() - предполагаемое время переходного
процесса.
- предполагаемое время переходного
процесса.
Р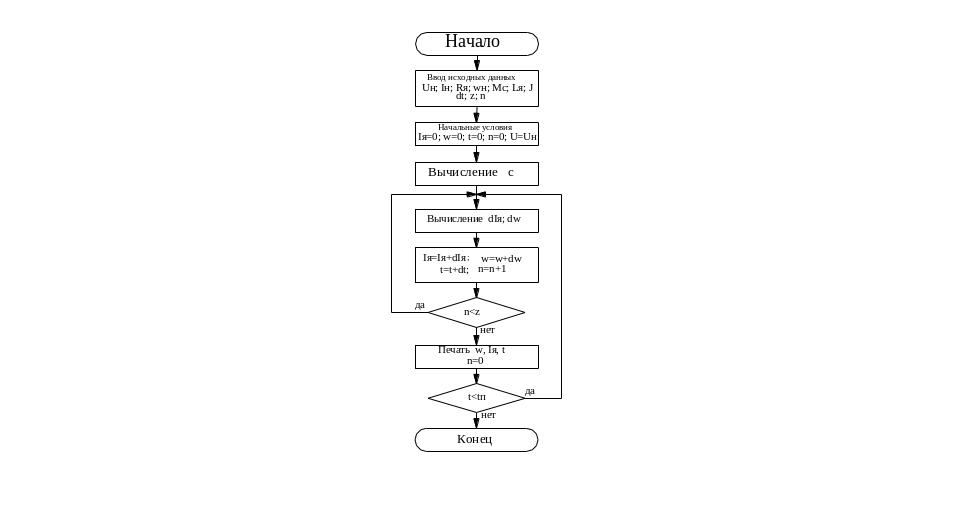 ис.2
ис.2
На основании моделирования необходимо построить две характеристики: механическую и регулировочную.
Механическая
характеристика
![]() строится по двум точкам при некоторых
значениях момента сопротивления.
строится по двум точкам при некоторых
значениях момента сопротивления.
Для построения
регулировочной характеристики
![]() необходимо задать 6...8 значений напряжения
(влево и вправо от номинального значения)
и определить значения установившейся
частоты вращения.
необходимо задать 6...8 значений напряжения
(влево и вправо от номинального значения)
и определить значения установившейся
частоты вращения.
По регулировочной
характеристике определяют значения
минимальной
![]() и максимальной
и максимальной
![]() частот вращения и соответствующие им
напряжения
частот вращения и соответствующие им
напряжения
![]() и
и
![]() .
.