

2. Модель вход-состояние-выход
2.1 Понятие состояния и уравнение состояния
Рассмотрим электрическую цепь известной структуры, содержащую один вход и один выход.
Входным сигналом цепи служит функция времени v(t), а выходным— функция времени у(t). Имея полную информацию о цепи, для определения выхода y(t) на интервале времени (t0, t) достаточно знать входной сигнал v(t) на всем данном временном интервале. Однако, если вход известен лишь а интервале времени (to, t), для определения выхода у(t) на указанном интервале необходимо знать токи на индуктивности и напряжения на конденсаторе в некоторый момент времени t*
Эти токи и напряжения образуют «состояние» цепи в момент t*.. В этом смысле состояние цепи связывается с ее памятью. В случае чисто активной цепи (с нулевой памятью) для определения текущего значения выхода требуется только знание текущего значения входа.
В качестве другого примера состояния
системы рассмотрим решение линейного
дифференциального уравнения с постоянными
коэффициентами при t0![]() t.
Так как общее решение получается
зависящим от произвольных постоянных,
то эти постоянные можно определить
из условия удовлетворения системы
граничным условиям в момент времени
t0. Никакой
иной информации не требуется. Граничные
условия могут трактоваться как состояние
системы в момент t0.
Эвристически
состояние системы отделяет будущее
от прошлого, так что состояние содержит
всю информацию о прошлом системы,
необходимую для определения реакции
на произвольный входной сигнал.
t.
Так как общее решение получается
зависящим от произвольных постоянных,
то эти постоянные можно определить
из условия удовлетворения системы
граничным условиям в момент времени
t0. Никакой
иной информации не требуется. Граничные
условия могут трактоваться как состояние
системы в момент t0.
Эвристически
состояние системы отделяет будущее
от прошлого, так что состояние содержит
всю информацию о прошлом системы,
необходимую для определения реакции
на произвольный входной сигнал.
Понятие состояния является основным понятием и, следовательно, не может быть определено более полно, чем, например, слово «множество» в математике. Наибольшее, что можно сделать в этом плане, это сформулировать свойства, какими должна обладать система, поведение которой отвечает понятию состоянияРассматриваемые здесь системы относятся к детерминированным. Детерминированная система определяется следующими образом:
1) Существует класс функций времени v(t), называемых допустимыми функциями входа
2) для каждого момента времени t определяется множество Хt элементы которого х(t) являются возможными состояниями;
3) каждой паре v(t), x(t) отвечает по крайне мере хотя бы одна функция времени, называемая функцией выхода, и для всякого t*>t в X содержится единственный элемент x(t*)
Условия, предъявляемы к множеству Xt можно записать в виде двух уравнений, называемых уравнениями состояния:
![]() (2.1.1)
(2.1.1)
![]() (2.1.2)
(2.1.2)
где как g, так и f являются однозначными функциями. Из уравнения (2.1.1) следует, что выходной сигнал у на Интервале (to, t) является однозначной функцией входного сигнала v на этом интервале времени и состояния в начале интервала. Состояние в конце интервала, как это следует из уравнения (2.1.2), является однозначной функцией такого же аргумента. Указанные два уравнения задают систему с определенным в ней состоянием.
В качестве составляющих вектора состояния в схеме моделирования большей частью используются выходы интеграторов.
Вектор состояния определяется в n-мерном пространстве состояний с координатами хи х2, ..., х„. Движение конца вектора состояния в пространстве состояний называется траекторией вектора состояния.
Для системы, описываемой системой обыкновенных линейных
дифференциальных уравнений, уравнения состояния записываются как:
x(t) = A(t)x(t)+B(t)v(t), (2.1.3)
y(t) = C(t)x(t) + D(t)v(t)
где, A(t), B(t), C(t) и D(t) являются в общем случае матрицами с изменяющимися во времени коэффициентами. x, v и y – векторы размерности n, m и p соответственно.
В общем случае блок-схема, соответствующая (2.1.3) изображена на рисунке ниже
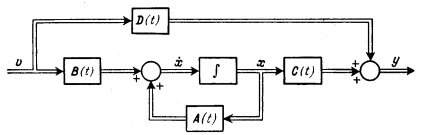
Если коэффициенты системы не меняются во времени, то в дальнейшем будем их обозначать просто A, B, C и D.