

§5. Штанговые и шаговые конвейеры.
Перемещают габаритные изделия: машины, станки, и т.д. вдоль технологической линии.
Их можно устанавливать на уровне пола, легко встраивать в технологические линии, поэтому они нашли применение в гибких производственных системах (ГПС).
Штанговые конвейеры с собачками.
рис.35
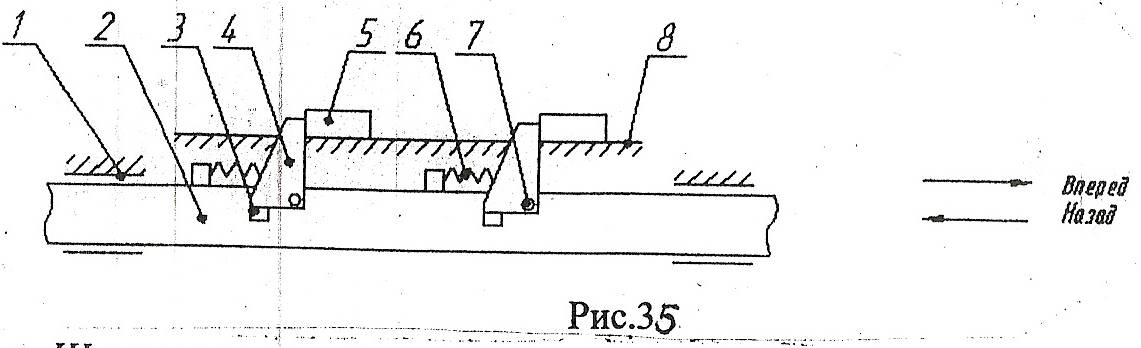
На штанге 2, совершающей возвратно-поступательное движение в направлении 1 на осях 7 устанавливаются собачки 4, поджатые пружинами растяжения 6 в упорах 3.
При движении штанги вперед собачки упираются в грузы 5 и перемещают их по направлению 8 на 1 шаг в направлении движения штанги.
При движении штанги назад собачки 4 своей тыльной стороной упираются в переднюю часть груза 5 и растягивают пружину 6, поворачиваются на осях 7 вперед, утапливаются в прорези ( на рисунке не показана) на штанге и проходят под грузами 5. Затем цикл повторяется.
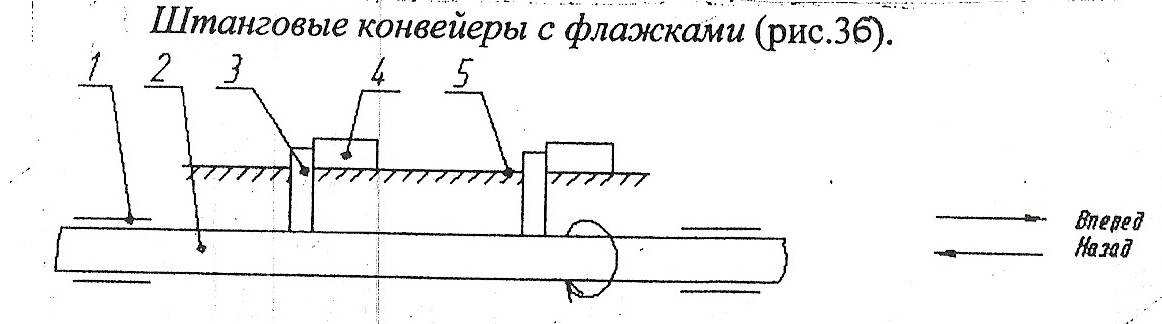
Штанговые конвейеры с флажками рис.36.
Штанга 2 перемещается в направлении 1, на штанге закреплены флажки (упоры) 3. При движении штанги вперед, флажки 3 упираются в грузы 4 и перемещаются по направлению 5 на 1 шаг в направлении движения штанги.
В конце рабочего хода штанга поворачивается вокруг своей оси на 90ْ. Флажки занимают горизонтальное положение. Затем штанга совершает ход назад. В конце обратного хода штанга поворачивается вокруг своей оси в исходное положение на 90 ْ. Флажки 3 занимают вертикальное положение и входят в контакт с грузами 4, цикл повторяется.
При перемещении грузов непосредственно по направляющим изнашивается направляющая и нижняя поверхность груза. Поэтому конвейеры с флажками применяются для некрупных грузов. Для тяжелых грузов применяется конвейер с тележками.
Штанговый цепной конвейер (рис.37).
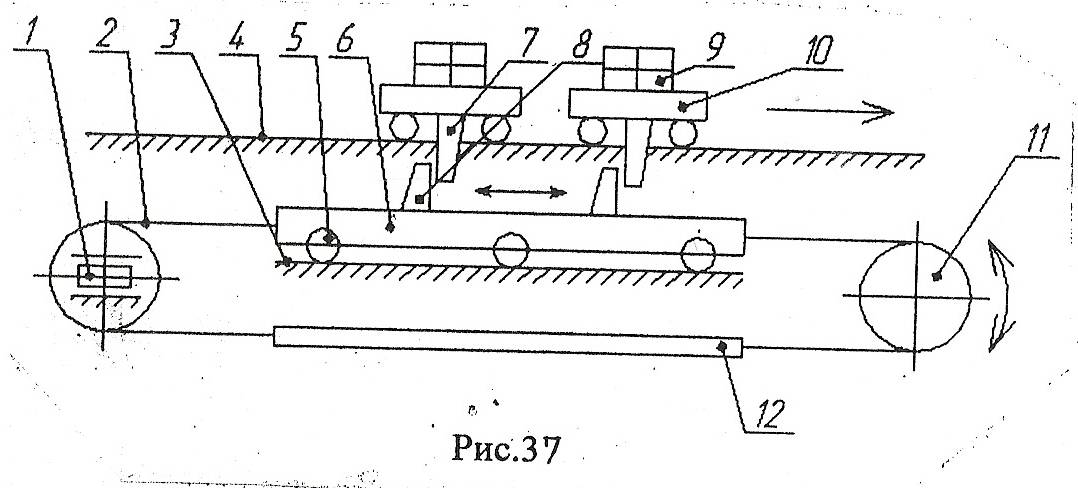
Грузоведущая штанга 6 соединена цепями 2 с нижней тягой 12 и перемещаются на катках 5 по направляющим 3. Движение цепям сообщают звездочки 11. Натяжение цепей осуществляет натяжное устройство 1. Привод конвейера и конструкция натяжного устройства на рис не показаны. Привод включает попеременно на рабочий и холостой ход. При движении штанги 6 вперед кулачки 8 упираются в собачки 7 грузовых тележек 10 и перемещают тележки 10 с грузами 9 по рельсам 4 на 1 шаг в направлении штанги. При ширине полей тележек до 2,5 м применяются одноштанговые, при большей – двухштанговые.
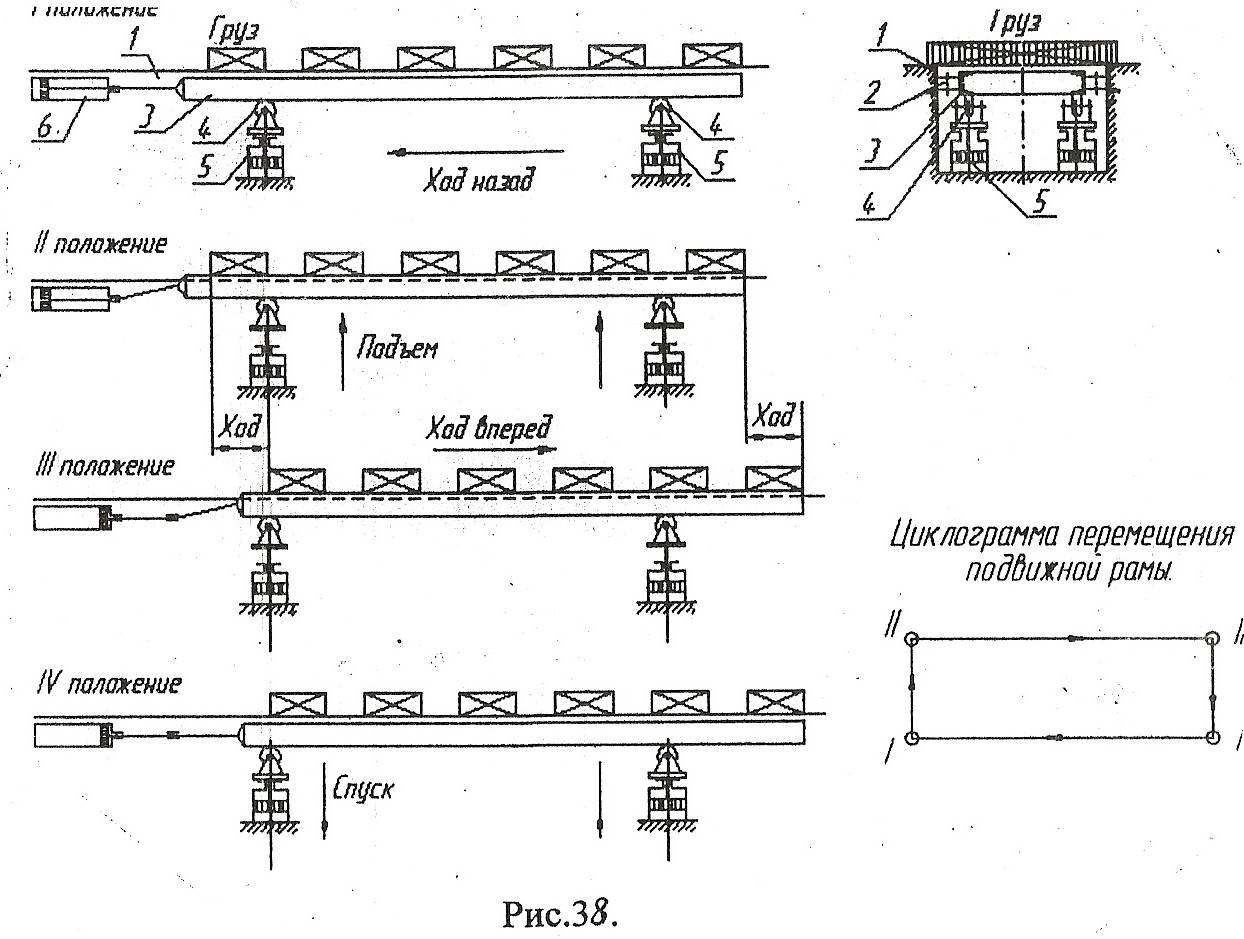
Шаговые конвейеры (рис 38).
Состоит из неподвижной рамы 1 и подвижной рамы 3, центрируемой относительно 1 рамками 2. Подвижная рама 3 опирается на рамки 4 механизмов подъема 5. Имеется также механизм горизонтального перемещения 6. В исходном (положение I) подвижная рама расположена ниже уровня неподвижной, на неподвижную раму устанавливаются грузы с определённым шагом. Затем включают механизм подъёма на ход вверх. Подвижная рама поднимается выше уровня неподвижной рамы на 10-20 мм и снимает грузы с неподвижной рамы (положение II). Затем включают механизм горизонтального перемещения на ход вперед. Подвижная рама перемещается вместе с грузами вперед на один шаг(в положение III). Включается механизм подъема на ход вниз. Подвижная рама опускается ниже уровня неподвижной рамы и устанавливает грузы на неподвижную раму в новом положении (IV). Затем включается механизм горизонтального перемещения на ход назад и подвижная рама возвращается в исходное положение I. Затем цикл повторяется.
Горизонтальный ход подвижной рамы 2-3м. Вертикальный ход – 30-50 мм. Средняя скорость перемещения груза – до 10 м/мин. В конце рабочего хода скорость подвижной рамы плавно замедляется с тем, чтобы обеспечить установку грузов на фиксирующие штифты.