

Лабораторная работа №3 / попытка сделать ЛР3
.doc

1.Снятие статической характеристики датчика обратной связи.
Результаты измерений сведены в таблицу 1:
Таблица 1.
|
h,мм |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
U(В) |
0.02 |
0.03 |
0.06 |
0.07 |
0.10 |
0.15 |
0.26 |
0.46 |
0.60 |
0.86 |
1 |
1.3 |
|
h,мм |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
U(В) |
1.52 |
1.76 |
2.13 |
2.42 |
2.70 |
3.0 |
3.9 |
3.19 |
3.23 |
По полученным данным построим
график зависимости
![]() .
График представлен на рисунке 2:
.
График представлен на рисунке 2:
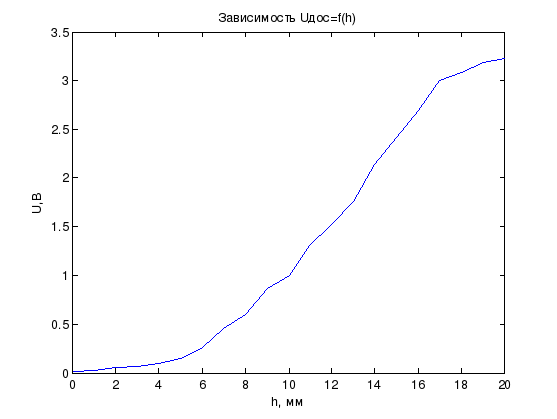
Рис. 2. График зависимости
![]() .
.
Рассчитаем коэффициент передачи датчика обратной связи по формуле:
![]()
Произведя вычисления по всем измерениям таблицы 1 и усреднив полученные результаты, получим:
![]() В/см.
В/см.
Однако по полученному графику
зависимость
![]() от h
представляется скорее квадратичной.
Проверим это, построив на одном рисунке
графики
от h
представляется скорее квадратичной.
Проверим это, построив на одном рисунке
графики
![]() и параболу
и параболу
![]() .
.
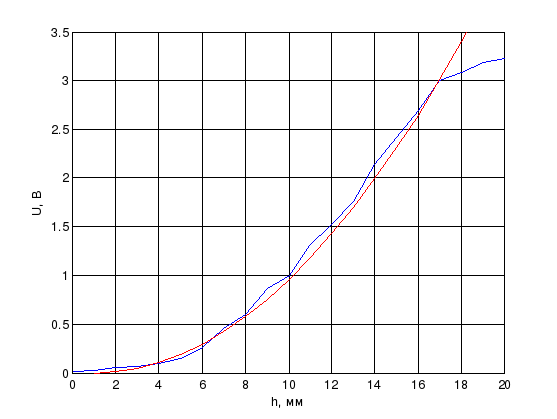
Рис. 2.1. Графики
![]() (синий)
и парабола
(синий)
и парабола
![]() (красный).
(красный).
На рисунке 2.1 четко видна нелинейная зависимость напряжения ДОС от положения шторки.
2. Снятие характеристики поверочного расчета УПТ при напряжении на входе УПТ 0.3 В.
Результаты измерений сведены в таблицу 2:
Таблица 2.
|
|
5 |
13 |
29 |
45 |
63 |
80 |
105 |
125 |
145 |
|
|
1.66 |
4.66 |
9.12 |
16.07 |
24.2 |
31 |
39.9 |
49.2 |
55.6 |
В таблице 2 приведены значения коэффициентов, указанные макете. Для проверки соответствия указанных коэффициентов реальным, вычислим реальные коэффициенты по формуле:
![]()
Результаты вычислений сведены в таблицу 3:
Таблица 3.
|
|
5 |
13 |
29 |
45 |
63 |
80 |
105 |
125 |
145 |
|
|
5.53 |
15.53 |
30.40 |
53.56 |
80.66 |
103.33 |
133.00 |
164.00 |
185.33 |
Построим график зависимости
![]() для номинальных и реальных значений
коэффициента усиления. График представлен
на рисунке 3:
для номинальных и реальных значений
коэффициента усиления. График представлен
на рисунке 3:
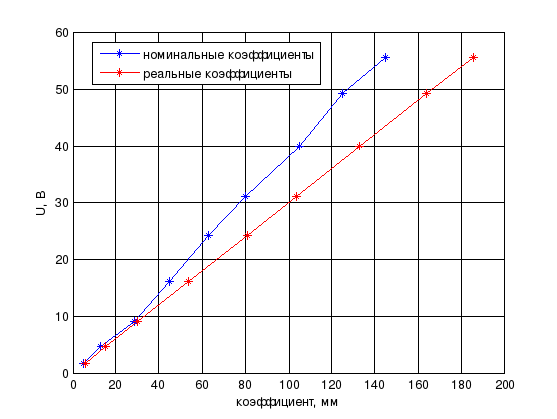
Рис. 3. График зависимости
![]() .
.
3.
Определение статической характеристики
усилителя при
 .
.
Результаты измерений сведены в таблицу 4:
Таблица 4
|
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
|
|
12.95 |
18.65 |
26.9 |
32.6 |
39.2 |
46.1 |
51.5 |
По данным таблицы 4 построим
график зависимости
![]() :
:
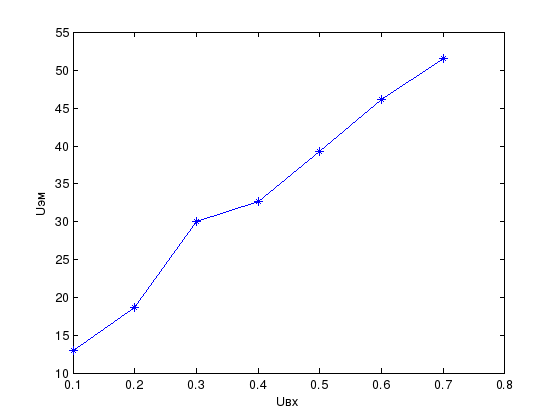
Рис.4. График зависимости
![]() .
.
Судя по графику кажется, что зависимость близка к линейной. Рассчитаем реальное значение коэффициента усиления:
|
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
|
|
12.95 |
18.65 |
26.9 |
32.6 |
39.2 |
46.1 |
51.5 |
|
|
129.50 |
93.25 |
99.66 |
81.50 |
78.40 |
76.83 |
73.57 |
Для наглядности построим
графики
![]() и
и
![]() .
График построен на рисуке 5.
.
График построен на рисуке 5.
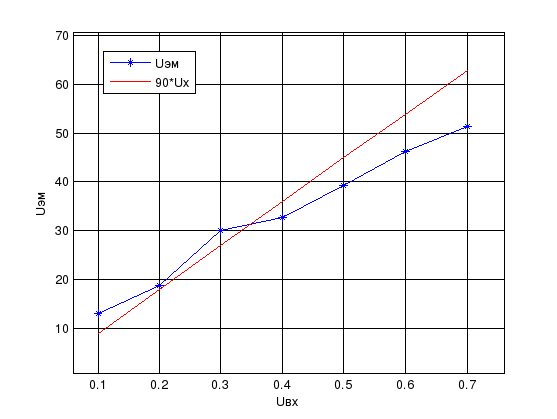
Рис. 5. Графики
![]() и
и
![]() .
.
Из сравнения графиков на рисунке 5 видно, что реальный коэффициент усиления отличается от номинального в 90.
Однако зависимость
![]() представляется линейной. Попробуем
подобрать прямую вида y=kx+b,
удовлетворяющую полученным результатам.
Такой прямой оказалась прямая
представляется линейной. Попробуем
подобрать прямую вида y=kx+b,
удовлетворяющую полученным результатам.
Такой прямой оказалась прямая
![]() .
Убедимся в этом, построив обе прямые на
одном графике:
.
Убедимся в этом, построив обе прямые на
одном графике:
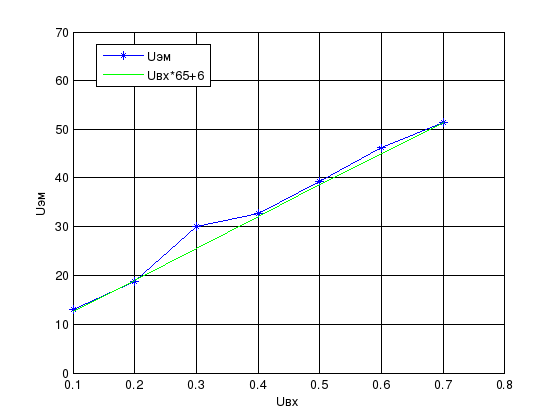
Рис.6. Прямая
![]() и график
и график![]()
Выводы.
По рисунку 2.1 можно сделать вывод, что напряжение ДОС зависит от положения шторки нелинейно. Зависимость квадратичная.
По рисунку 3 и таблице 3 видно, что значения коэффициента усиления, указанные на макете, не вполне соответствуют реальному значению коэффициента.
По графику на рисунке 6 видно,
что зависимость
![]() линейная, хотя и не вида y=kx.
линейная, хотя и не вида y=kx.
Этап №2
Цель работы:
1) Изучение принципа действия и математического описания системы стабилизации положения магнитного тела.
2) Уточнение математической модели объекта управления и системы в целом.
3) Расчет параметров корректирующих устройств ( в том числе машинными методами).
4) Экспериментальное определение статических и динамических характеристик системы регулирования.
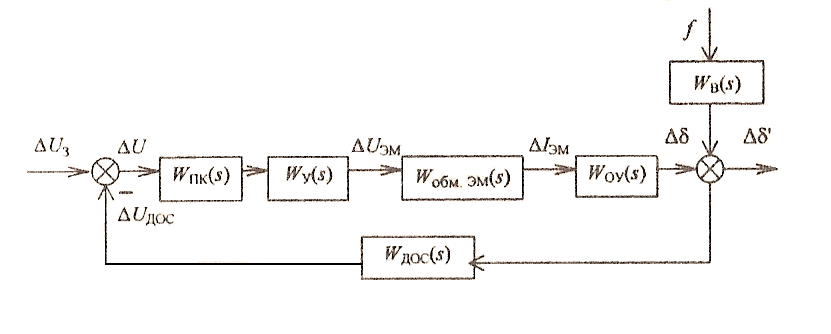
Рис.1.
Математические модели звеньев.
Усилитель постоянного тока:
![]()
Датчик обратной связи:
![]()
Обмотка электромагнита:
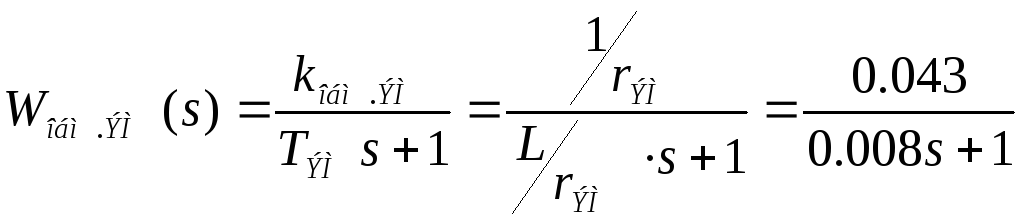
Объект управления:
![]()
Необходимо рассчитать передаточную функцию звена коррекции.
1)Расчет Д-RC цепи.
Схема Д-RC цепи представлена на рисунке 2:
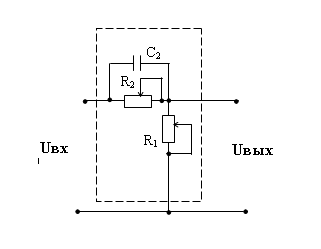
Рис. 2. Схема корректирующей Д-RC цепи.
![]() где
где
Таким образом, передаточная функция дифференцирующей RC-цепи:
![]()
Или:
![]() где
где
![]()
Передаточная функция разомкнутой системы без коррекции:

ЛАЧХ и ЛФЧХ разомкнутой системы (синим цветом), а также ЛАЧХ и ЛФЧХ звена коррекции (зеленым) представлены на рисунке 3.
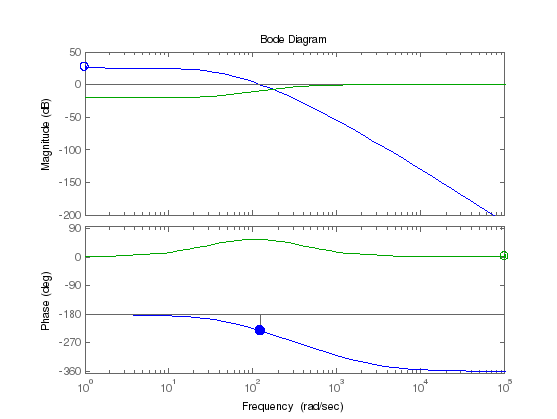
Рис. 3. ЛАЧХ и ЛФЧХ разомкнутой системы (синим цветом), ЛАЧХ и ЛФЧХ звена коррекции (зеленым)
Передаточная функция разомкнутой системы с корректирующим звеном:

ЛАЧХ и ЛФЧХ разомкнутой системы с коррекцией представлены на рисунке 4.
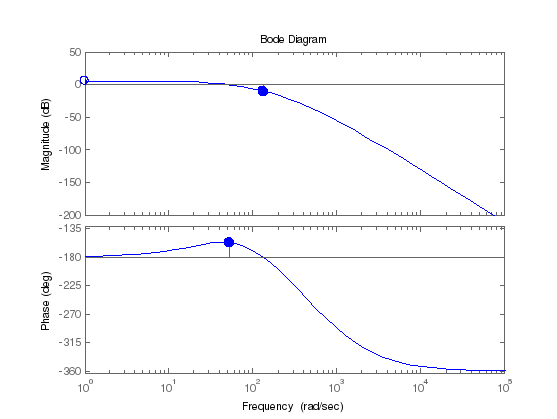
Рис. 4. ЛАЧХ и ЛФЧХ разомкнутой системы с коррекцией.
Реакция замкнутой системы с коррекцией на единичный импульс:

Рис. 5. Реакция замкнутой системы с коррекцией на единичный импульс.
![]()
Статическая ошибка в этом случае:
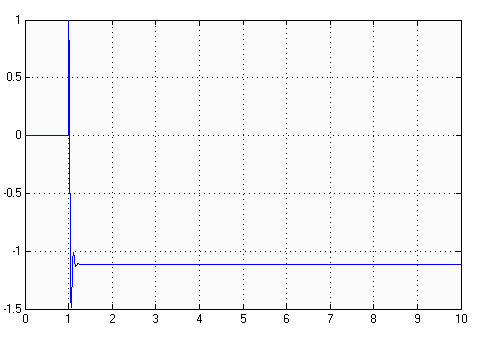
Рис. 6. Статическая ошибка в системе с ИД – звеном коррекции.
Передаточная функция для ПКЦ:
![]()
Т.е.
![]() ,
откуда:
,
откуда:
 ,
где
,
где
![]()
Следовательно:
2) Расчет интегро-дифференцирующей RC-цепи.
Схема интегро-дифференцирующей RC-цепи представлена на рисунке 6:
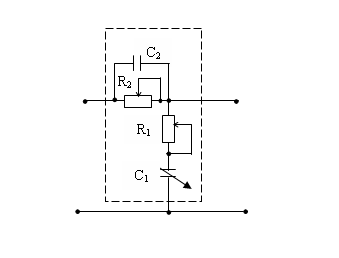
Рис. 7. Схема интегро-дифференцирующей RC-цепи.
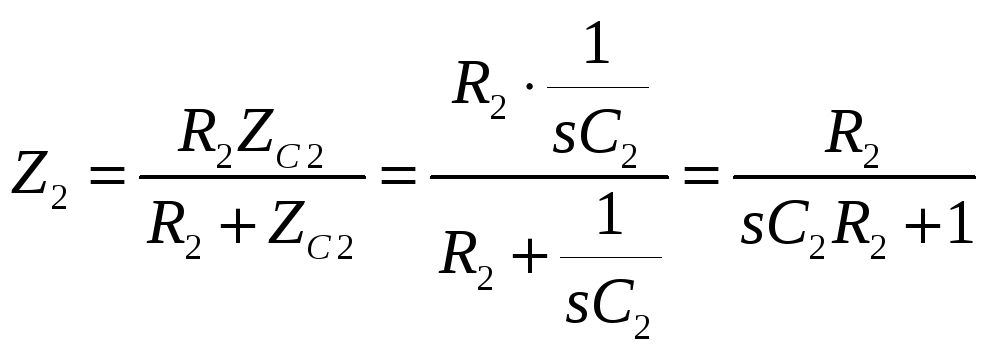
Расчет цепи:
![]() где
где
Передаточная функция интегро-дифференцирующей RC-цепи:

Или в другом виде:
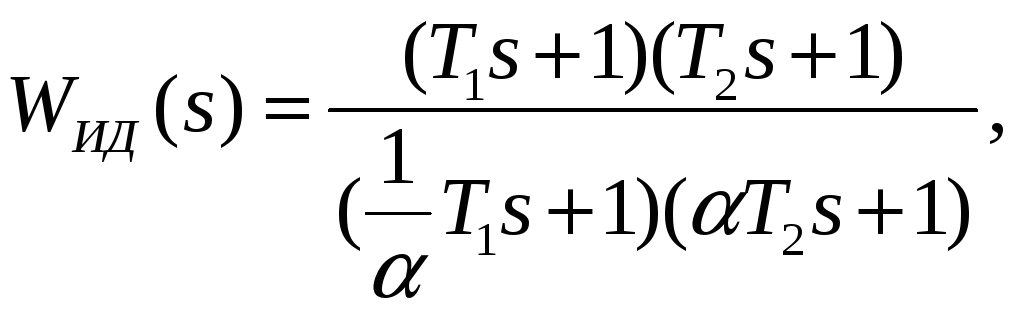
где
![]()
Логарифмическая частотная характеристика разомкнутой системы без коррекции на рисунке 7:
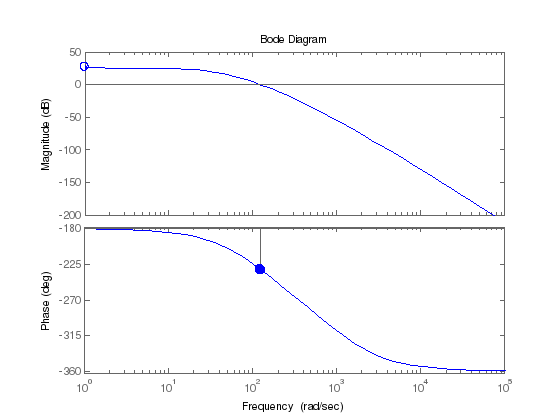
Рис. 8. ЛАЧХ и ЛФЧХ разомкнутой системы без коррекции.
Подобранные коэффициенты:
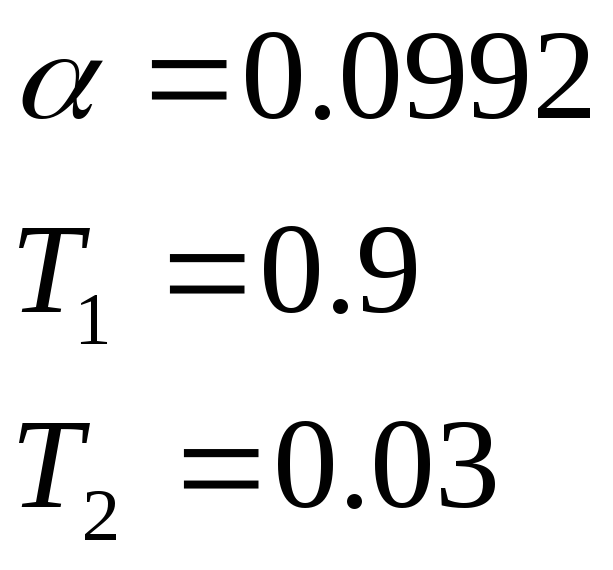
Откуда имеем:
Переходная характеристика замкнутой системы с ИД-RC коррекцией:
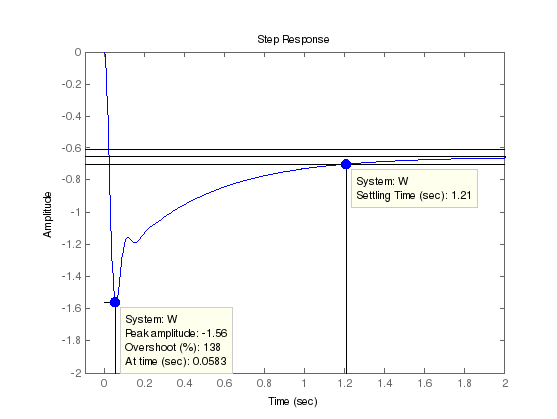
Рис. 9. Переходная характеристика замкнутой системы с ИД-RC коррекцией.
 %
%
Перерегулирование и время регулирования хуже, чем в случае с Д-RC цепью, однако статическая ошибка значительно меньше:
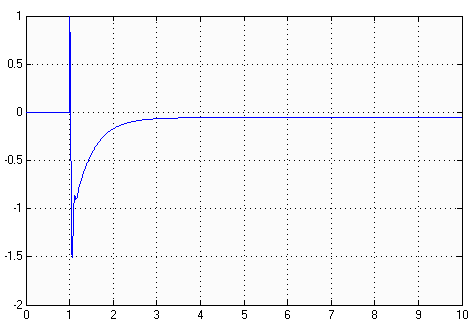
Рис. 10. Статическая ошибка в системе с ИД – звеном коррекции.
Выводы
Был произведен расчет регуляторов для системы управления магнитным подвесом. Получены параметры для дифференцирующих и интегро-дифференцирующих RC-цепочек. В системе с ИД – цепочкой наблюдаются значительные, большие по сравнению с Д-RC коррекцией, перерегулирование и время регулирования. Но установившаяся ошибка близка к нулю, в отличие от случая с Д-RC коррекцией.
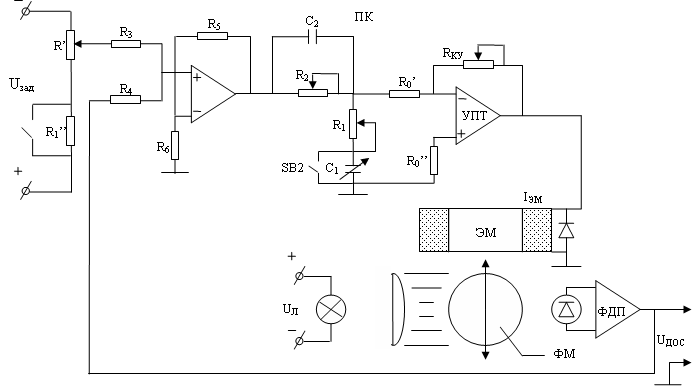
Рис. . Принципиальная схема макета.