

Тема 8 „системи електропривода постійного струму”
8.1 Електропривод по системі „Електромеханічний перетворювач енергії – двигун постійного струму”
Електромашинний підсилювач (ЕМП) в системах автоматичного управлін-ня може виконувати самі різноманітні функції: генератора, збуджувача, суматора і підсилювача. Найбільше застосування ЕМП знаходить в електроприводах по системі генератор – двигун (Г – Д) як збуджувач головних машин (ЕМЗ). Управляючі обмотки ЕМП розраховані на 6-8 кратне перевантаження, що дозволяє за рахунок форсировки істотно скорочувати перехідні процеси і одержувати електроприводи високої швидкодії.
В порівнянні із системами релейно-контакторного управління електромашинні збуджувачі мають ряд переваг [1] : 1) безперервність управління; 2) розміщення апаратів управління в малопотужних ( порядку часткі вата ) колах управління ЕМП, унаслідок чого їхня потужність і габарити істотно скорочуються; 3) підвищену швидкодію; 4) простоту підсумовування сигналів.
Для підвищення жорсткості й одержання спеціальної форми характеристик в системи електромашинного управління вводяться зворотні зв'язки. Основні варіанти включення таких зв'язків дані на рисунку 1 стосовно до використання ЕМП як збуджувача генератора. В схемі на рис. 1,а передбачений жорсткий негативний зворотний зв'язок по напрузі генератора, сигнал якого подається на окрему обмотку управління ЕМП ( LGA..2 ). Часто сигнал зворотного зв'язка подається на ту ж обмотку, що і задаючий сигнал, як показано на схемах рис. 1,г і рис. 1,д. У цьому випад-ку економія виходить за рахунок кількості використовуваних обмоток. Крім того, обривання кола такої обмотки не приводить до аварійних режимів, тому що одночасно припиняється дія задаючого сигналу і сигналу зворотного зв'язка. На схемі рис. 1,б показана система з позитивним зворотним зв'язком по струму. Для більшої стійкості системи, а також з метою розширення діапазону регулювання частоти обертання за рахунок зменшення залишкового намагнічування ЕМП останній охоплений жорстким негативним зворотним зв'язком по напрузі ( обмотка LGA..3). В схемі рис. 1,в здійснений негативний зворотний зв'язок по швидкості за допомогою тахогенератора BR. У малопотужних системах тахогенератор часто заміняють тахометричним мостом. На схемах рис. 1,г і рис. 1, д представлені часто зустрічні комбінації зазначених зворотних зв'язків.
Для створення форсованих режимів знаходять застосування ЕМП з запасом по напрузі і з досить великим залишковим намагнічуванням, що погіршує стабільність роботи систем за рахунок неоднозначності регулювальної характеристики підсилювача. Звуження петлі гистерезиса домагаються введенням сильного негативного зворотного зв'язка по напрузі
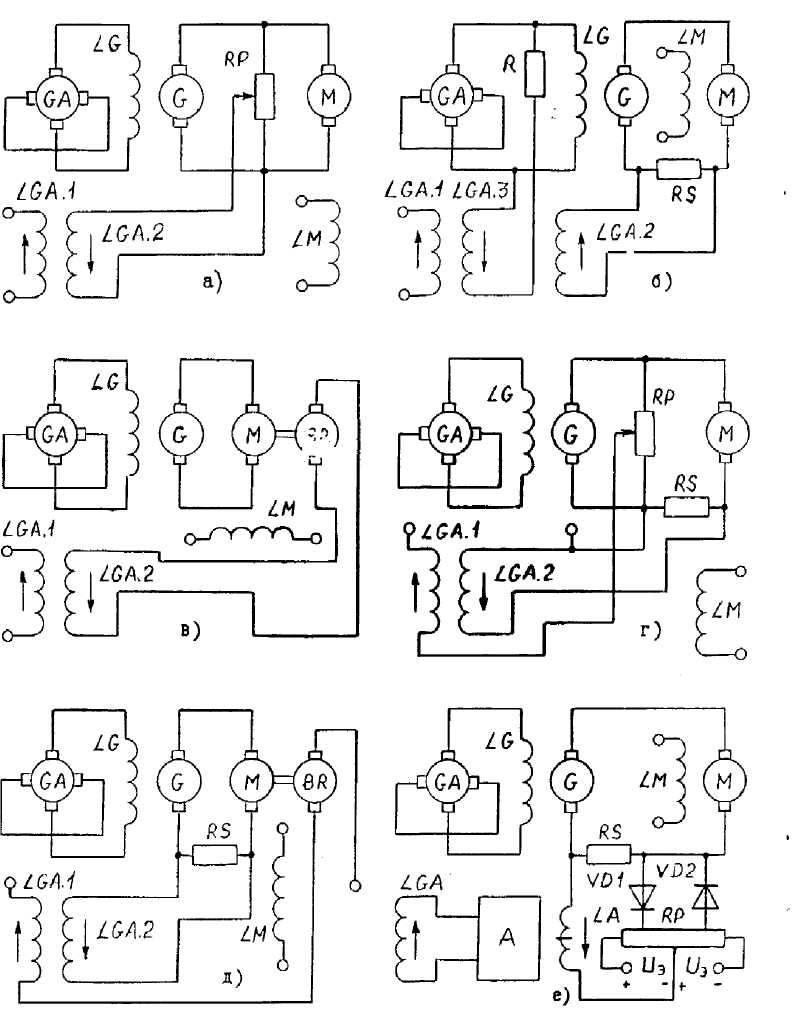
Рисунок 8.1 – Основні варіанти вмикання зворотних зв’язків у системі
ЕМП-Г-Д
самого ЕМП ( див. схему на рис. 1,б ). Однак це приводить до істотного зниження коефіцієнта підсилення, що приходиться компенсувати введенням в систему проміжного підсилювача, найчастіше двотактного магнітного (див. рис. 1,е ).
Магнітні підсилювачі ( МП ) мають гальванічну розв'язку між вхідними і вихідними колами, надійні в роботі і дозволяють підсумовувати декілька сигналів. При цьому легко досягаються досить високі коефіцієнти підсилення і підвищується якість управління.
Усі зазначені вище зв'язки є жорсткими, тому що вони працюють і в перехідних і в усталених режимах. Крім них знаходять застосування гнучкі зворотні зв'язки, що діють тільки в перехідних режимах і створювані за допомогою різних коригувальних пристроїв в виді диференцуючих і інтегруючих контурів і елементів.
Для поліпшення характеристик і підвищення ефективності роботи електропривода прибігають до застосування нелінійних зворотних зв'язків, що звичайно здійснюються з різними вузлами відсічок.
Негативний зворотний зв'язок по струму з відсічкою виконано ( див. рис. 1,е ) за допомогою обмотки підсилювача LA . Ця обмотка увімкнута через вентилі VD1 і VD2 в контур порівняння еталонної напруги UЭ і падіння напруги на шунті RS якірного кола головних машин G і M . Параметри контуру підбираються таким чином, щоб струмова обмотка вступала в дію при великих значеннях якірного струму і припиняла свою дію при струмах нижче заданої величини. Опір порівняння RP виконано симетричним, і при ході вперед діє один випрямляч з відповідною частиною опору порівняння, а при реверсі – інший і інша частина RP. Намагнічуваль-на сила ( НС ) струмової обмотки в процесі розгону системи спрямована зустрічно з задаючою обмоткою. На початку пуску двигуна діють обидві обмотки МП : що задає ( на рис. 1,е не показана ) і струмова, тому що струм якоря швидко досягає уставки відсічки. В міру збільшення швидкості обертання двигуна струм в якорі зменшується, і при величині нижче відсічки дія струмової обмотки припиняється. Ефект струмового зворотного зв'язка в сталому режимі залежить від величини навантаження двигуна. Якщо струм якірного кола не досягає уставки відсічки, струмова обмотка не працює. При цьому результуюча НС підсилювача визначається тільки НС задаючої обмотки. Подальше збільшення навантаження і струму якірного кола при-водять ( по досягненню значення відсічки ) в дію струмову обмотку, знижуючи напругу на виході генератора.
Генератори постійного струму і ЕМП мають електромагнітну інерційність. Електричні генератори звичайно приймаються еквівалентними по дії аперіодичним ланкам, у яких коефіцієнт підсилення і постійна часу є функції струму збудження з урахуванням насичення стали. В окремих випадках, наприклад при ненасиченому генераторі чи при малих змінах струму збудження, коефіцієнт підсилення і постійна часу вважаються постійними. У генераторів постійні часу обмоток збудження складають від десятих часток секунди до декількох секунд. Постійні часу ЕМП знахо-дяться в межах від декількох сотих до декількох десятих часток секунди в залежності від їхньої потужності, схеми включення і режиму роботи. У зв'язку з цим часто виникає задача управління збудженням генераторів і великих ЕМП з форсировкою [2]. Форсировка збудження генератора забезпечується спеціальними релейними схемами і негативними жорсткими зворотними зв'язками по напрузі і швидкості, яки в початковий період збудження забезпечують прикладання до обмотки управління ЕМП повного сигналу задаючої напруги. Цей сигнал може в 2-10 разів перевищувати номінальну напругу обмотки управління і спричинювати швидке наростання струму управління в початковий період збудження.
Магнітні підсилювачі в динаміці ( в найпростіших випадках ) еквівалентні по дії інерційному підсилювачу з обмеженням по вихідній потужності, напрузі чи струму в режимі повного підмагнічування. Цю обставину використовують для виконання систем Г-Д з відсічкою по струму підсилювача і по е.р.с. генератора. В більш складних випадках вони є елементами з декількома інерційностями і з неоднозначними характеристиками.
Однак ЕМП мають ряд недоліків. Вони важкі і громіздкі, вимагають значних експлуатаційних витрачань і капітальних витрат. Електромашинні підсилювачі, крім того, працюють не дуже стабільно, змінюють режим роботи при нагріванні і вимагають періодичного підстроювання. Їхня надійність, як обертових перетворювачів, нижче, ніж надійність статичних підсилювачів, а коефіцієнт корисної дії разом із приводним двигуном часто не перевищує ( 60-70 ) %.
Основні недоліки МП : низькі коефіцієнти корисної дії і потужності, инерційність управління – обмежують його застосування. Але по надійності і довговічності системи автоматичного управління з магнітними підсилювачами перевершують чи не уступають іншим системам зі статичними перетворювачами.