

Перелік посилань
1. Основы автоматизированного электропривода / М.Г.Чиликин, .М.Соколов, В.М.Терехов, А.В.Шинянский.- М.:Энергия, 1974.- 508с.
2. Башарин А.. В., Новиков В.А.., Соколовский Г. Г. Управление електроприводами: Учебное пособие для вузов.- Л.: Энергоиздат, 1982.- 392 с.
9.2 Асинхронний електропривод з фазним керуванням
Тиристорний перетворювач напруги ( ТПН ) – це пристрій, що складається з напівпровідникових комутуючих швидкодіючих елементів і зв’язуючих їх силових кіл, а також кіл управління, захисту і сигналізації. В асинхронному електроприводі тиристорні комутатори використовуються найчастіше або як безконтактні ключі, що періодично замикають силові кола, або у виді вентильних перетворювачів напруги, що дозволяють відносно просто реалізовувати різноманітні режими управління двигуном ( АД ).
Системи ТПН-АД знайшли широке застосування в різних галузях промисловості і сільського господарства як з метою підвищення надійності інтенсивно працюючих, особливо в агресивному середовищі, асинхронних електроприводів з великим числом включень, так і для одержання ряду спеціальних режимів таких приводів [1].
Основними елементами ТПН є паралельно включені силові вентилі, що представляють собою швидкодіючі ключі, за допомогою яких можна комутувати кола змінного струму і змінювати діючі значення напруги на навантаженні і споживаного струму.
Деякі варіанти силових кіл 3-х фазних ТПН , що виконують роль комутуючих і регулюючих пристроїв для статорних обмоток асинхронних електроприводів, показані на рисунку 1. Оцінка таких схем виробляється на основі наступних критеріїв [2] :
- числа умовних тиристорів і ступеня їхнього використання зі струму;
- напруги, що прикладається до тиристорів у прямому і зворотному напрямках;
- коефіцієнта форми анодного струму;
- конструктивних особливостей ( можливість об'єднання охолоджувачів і ін.);
- умов захисту тиристорів і споживача;
- складності схеми управління;
- можливого діапазону зміни швидкості і моменту двигуна, ступеня його управляємості;
- енергетичних показників і ін.
На рисунку 9.1 приведені лише схеми, що можуть застосовуватися для двигунів з обмоткою статора , з'єднаною в зірку без нульового проводу. Таке з’єднання обмотки статора є найбільш розповсюдженим у промисловості. Управління тиристорами приймається симетричним, коли відсутня постійна складова напруги. Для представлених схем частота комутації двигуна жорстко зв'язана з частотою мережі і кратна їй, причому кратність визначається числом тиристорів у фазах статора і дорівнює 6 в схемі рис. 9.2,а, 3- в схемах рис.9.2, б,в, 4- в схемі рис.9.2,г. Число тиристорів одночасно характеризує і назву схем: ТПН-6; ТПН-3; ТПН-3Т3Д (три тиристори і три діоди); ТПН-4 [3]. Начало комутації окремих фаз статора строго синхронізовано із відповідними напругами мережі.

Рисунок 9.2 – Схеми силових кіл ТПН в статорних обмотках
асинхронних двигунів:
а – ТПН-6; б – ТПН-3; в – ТПН-3Т3Д; г – ТПН-4
Зміна напруги на навантаженні здійснюється фазовим управлінням шляхом регулювання кута α , що відповідає моменту відкриття вентилів. Причому вихідна напруга перетворювача залежить не тільки від кута α , але і від кута провідності тиристорів λ , еквівалентного кута навантаження двигуна φэ , ЕРС обертання двигуна і його конкретних параметрів [4]. Cлід враховувати, що кут λ зв'язаний з кутами α і φэ трансцендентним рівнянням [5]. Наприклад, при зміні кута α навіть при постійній швидкості АД спостерігається зміна кута λ , що сполучено зі зміною еквівалентного фазового кута навантаження φэ.
В схемі ТПН-6 без нульового проводу робота усіх фаз взаємозалежна і для протікання струму навантаження необхідно одночасне відмикання тиристорів у декількох ( 2-х чи 3-х ) фазах. В схемі ТПН-3 є тільки три тиристори. Однак в ній усі кола знаходяться під лінійною напругою і необхідний розширений діапазон зміни фази імпульсів управління. Схема ТПН-3Т3Д відрізняється тим, що для управління всіма тиристорами можна використовувати одне джерело. Діапазон регулювання кута α як і в схемі ТПН-3 розширений. Спрощена схема ТПН-4 рекомендується лише для невеликих потужностей чи для одержання м'якого пуску.
Управління швидкістю двигунів в системі ТПН-АД базується на тім, що гармонійні складові моменту АД пропорційні в основному квадратам амплітуд перших гармонік напруг прямої і зворотної послідовностей. Це визначає два принципи управління моментом і швидкістю двигуна за допомогою ТПН : зміна першої гармоніки напруги прямої послідовності при симетричних ТПН і зміна співвідношення між напругами прямої і зворотної послідовностей при несиметричних ТПН . Обоє принципи реалізуються шляхом фазового управління кутом α і знаходять практичне застосування.
На рисунку 2 показаний загальний вид механічних характеристик електропривода в розімкнутій системі ТПН-АД при різних кутах управління α .
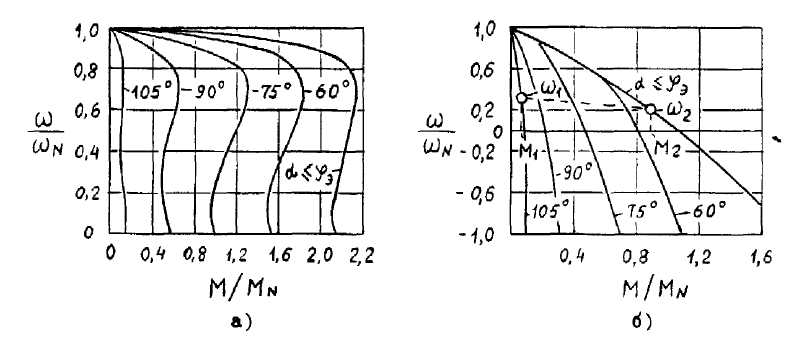
Рисунок 9.3 - Типові механічні характеристики електропривода при фазовому управлінні АД з короткозамкнутим ( а ) і фазним ( б) ротором
Очевидно, що при роботі на лінійній ділянці характеристики корткозамкнутий АД з ТПН не забезпечує глибокого регулювання швидкості ( див. рисунок 9.3,а ). Включення постійних додаткових опорів в кола ротора фазного АД істотно розширює можливий діапазон регулювання частоти обертання й усталеної роботи системи ( рисунок 9.3,б) .
При фазовому управлінні для одержання в системі ТПН-АД стійких зниже-них швидкостей необхідно застосовувати замкнуті системи регулювання [6]. На рисунку 3 показана типова структура підлеглої системи регулювання швидкості, що включає поряд із двигуном М и ТПН також датчики швидкості ( ДС ) і струму ( ДТ ) , регулятори швидкості ( РС ) і струму ( РТ ) . Напруга з задатчика інтенсивності ( ЗИ ) безпосередньо надходить на вхід регулятора швидкості. В системі управління використовуються негативні зворотні зв'язки по струму ( сигнал знімається із шунтів у виді напруги UШ ) і по швидкості ( сигнал знімається з тахогене-ратора у виді напруги UТГ ). Вихідний сигнал РТ формує напругу на вході блоку управління перетворювачем ( БУП ) , що і визначає поточне значення кута α . Область регулювання швидкості обмежена максимальною і мінімальною напругами обмотки статора двигуна і припустимим струмом первинної обмоти I1 , що задається вузлом струмообмеження УТО .
Жорсткість механічної характеристики електропривода в замкнутій системі визначається як глибиною негативного зворотного зв'язка по швидкості, так і типом регулятора РС . На рисунку 2,б показана ділянка формування механічної характеристики зі статичним регулятором швидкості ( відрізок пунктирної лінії між точками ω1 і ω2 ). При використанні астатичного регулятора швидкості механічні характеристики електропривода будуть абсолютно жорсткими. Крім заданої жорсткості характеристик регулятори покликані забезпечити стійкість системи і необхідну якість перехідних процесів.