

Закони змини напруги при частотному регулюванні швидкості ад
При виборі співвідношення між частотою і напругою, що підводяться до статора АД, найчастіше виходять з умови збереження перевантажувальної здатності асинхронної машини, тобто кратності критичного моменту до моменту статичного навантаження, для кожної з регулювальних механічних характеристик [ 1 ]:
![]() .
.
Зневажаючи спаданням напруги на обмотці статора і з огляду на те, що xk f1 і 0 f1, можна знайти:
де А - коефіцієнт, що не залежить від напруги і частоти; xk - реактивний опір короткого замикання.
Тоді для будь-якої частоти f1j джерела живлення і відповідної їй кутової швидкості j можна записати :
де U1j - фазна напруга джерела живлення ( відповідно на обмотці статора АД ) при частоті f1j ;
Мс(j) - момент статичного навантаження на валу двигуна при швидкості j=2f1j / p ;
р – число пар полюсів АД .
З останнього виразу випливає, що для будь-яких двох значень регульованої частоти f1j і f1k необхідно дотримуватися співвідношення
Звідси випливає основний закон зміни напруги при частотному регулюванні
швидкості асинхронного двигуна
![]()
Приймаючи один з режимів роботи двигуна за номінальний, тобто вважаючи, наприклад, що при f1k = f1н до затисків обмотки статора прикладена номінальна на-пруга U1н і при цьому двигун розвиває номінальної момент, і позначаючи f1j = fj , можна основний закон зміни напруги при частотному регулюванні записати у виді
![]()
![]()
або у відносних одиницях
![]() де
де
U1 = U1/U1н ; f1 = f1/f1н ; Мс = Мс/Мн ; U1, Мс— значення напруги на статорі і статичного моменту, що відповідають значенню регульованої частоти f1.
З отриманих виразів випливає, що закон зміни напруги U1 визначається не тільки частотою джерела живлення f1, але і характером зміни моменту статичного навантаження на валу двигуна при зміні кутової швидкості. Для багатьох механізмів залежність моменту статичного навантаження від кутової швидкості в зоні регулювання останньої може бути представлена у вигляді степеневої функції:
![]()
або у відносних одиницях :
Мс*
=
М0*
+
(1– М0*
)
ω![]()
![]() ,
,
де M0 — момент статичного навантаження при = 0.
З огляду на те, що f1, то виходить, f1 і вираз для Мс* можна запи-сати у вигляді
Мс*
=
М0*
+
(1– М0*
)
f![]() .
.
Перетворення виразів дає:

З усього різноманіття залежностей Мс() у теорії електропривода звичайно розглядаються три типи статичних навантажень, що найбільш часто зустрічаються: 1) момент статичного навантаження не залежить від швидкості ( рис.9.1, а ). При
цьому q = 0 ; Mс = const ( Mс* = 1 ) ;
2) при регулюванні швидкості потужність на валу двигуна залишається постій-
ною
( рис. 1, б ), тобто тут Рс
=
const, q = -1; Мo
=
0 ; Mс
=
Рс/
=
Мнн
/
; Мc*
= l / f1
;
3)
ідеалізоване вентиляторне навантаження
( рис. 1, в ). У даному випадку
Мо
= 0 ; q
=
2 ; Mс
=
Мн
(н
/
)2
;
Мс*
=
f![]() .
.
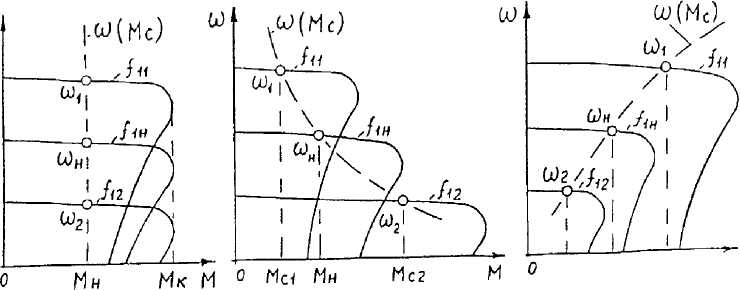
Рисунок 9.1- Механічні характеристики асинхронного двигуна при частотному регулюванні швидкості для випадку =const при умовах : Mс = const ( а ), Рc = const ( б ) і вентиляторному навантаженні ( в )
Таким чином для кожного з зазначених типів статичного навантаження можна аналітично записати основний закон зміни напруги при частотному регулюванні.
При постійному моменті на валу
U1
=
f1
або
отже при сталості моменту статичного навантаження напруга джерела живлення повинна змінюватись пропорційно його частоті.