

4.1.3 Интеллектуальный датчик
Современное высокотехнологичное производство предъявляет повышенные требования к точности измерения, безопасности и надежности измерительных приборов. Эту задачу успешно решают приборы с микропроцессорной электроникой, способные к взаимодействию с управляющими устройствами, а в некоторых случаях – и к самостоятельному исполнению роли управляющего устройства посредством коммуникационных протоколов обмена данными. Такие приборы называются интеллектуальными.
Интеллектуальный датчик способен самостоятельно подстраиваться под условия эксплуатации и непрерывно регулировать свою чувствительность в целях достижения максимальной эффективности. Своим «интеллектом» датчики обязаны микропроцессорным технологиям. Микропроцессор – это мозг датчика, позволяющий устройству «изучать» условия, в которых оно работает. Являясь самообучающейся микропроцессорной системой, такой датчик способен обрабатывать большие объемы информации с высокой скоростью. Именно благодаря микропроцессорам сегодня у пользователя есть весьма удобные в установке, настройке и применении датчики [81].

Рисунок 4.1.6 – Датчики «Метран»
Научно-технический и производственный потенциал промышленной группы «Метран» позволил в сжатые сроки разработать и организовать серийное производство нового интеллектуального поколения средств автоматизации, в соответствии с рисунком 4.1.6. Эти изделия по своим техническим характеристикам, эксплуатационным и функциональным возможностям не имеют аналогов среди приборов, производимых в России, и являются первыми серийными российскими датчиками давления и температуры с цифровым выходным сигналом в стандарте HART [58].
С появлением на российском рынке интеллектуальных отечественных датчиков технический уровень и безопасность эксплуатации технологического оборудования могут быть значительно повышены и получен принципиально новый уровень управления и контроля за технологическими процессами в важнейших отраслях промышленности: газовой, нефтяной, химической, металлургической, на объектах тепловой и атомной энергетики и др.
Коммуникационный протокол hart
Наличие микропроцессорной электроники позволяет сделать датчики действительно интеллектуальными, так как появляется возможность применения средств коммуникации между датчиком, различными управляющими устройствами и исполнительными механизмами. В настоящее время возможности обмена данными в АСУ обеспечиваются множеством коммуникационных протоколов – например, протоколом HART или полностью цифровыми Fieldbus-протоколами.
HART-протокол занимает промежуточное положение между аналоговыми и цифровыми и по сути является цифровым усовершенствованием токовой петли 4-20 мА, при этом сохраняется полная совместимость с существующими линиями 4-20 мА. Фактически, датчиками с поддержкой HART-протокола можно заменять аналоговые и использовать все преимущества цифрового обмена уже в действующих аналоговых системах.
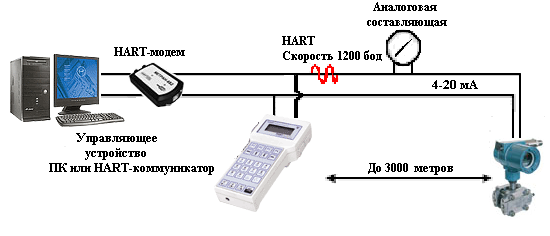
Рисунок 4.1.7 – Гибридный режим работы датчика
Благодаря этому, переход на интеллектуальный КИП можно сделать постепенным. Датчики, поддерживающие HART-протокол, обладают всеми свойствами аналоговых приборов, предоставляют возможность удаленного считывания значения измеряемого параметра в заданных единицах измерения (наличие индикатора на датчике в этом случае необязательно), обладают более высокой точностью и, кроме того, имеют широкий набор дополнительных возможностей по удаленной настройке, диагностике и конфигурированию. Управление интеллектуальными датчиками осуществляется с помощью портативного HART-коммуникатора или с персонального компьютера, оснащенного необходимым программным обеспечением и HART-модемом.
HART-протокол использует принцип частотной модуляции для передачи цифрового сигнала. Для передачи логической «1» HART-протокол использует один полный период частоты 1200 Гц, а для передачи логического «0» два неполных периода 2200 Гц.
Как видно на рисунке 4.1.7, HART-составляющая накладывается на токовую петлю 4-20 мА. Поскольку среднее значение синусоиды за период равно «0», то HART никак не влияет на измерительный сигнал 4-20 мА.
HART-протокол построен по принципу «главный-подчиненный», то есть полевое устройство отвечает по запросу системы.
Рассмотрим режимы работы интеллектуального датчика. Датчик может работать в гибридном режиме (режим совместимости с токовой петлей 4-20 мА), а также в многоточечном режиме.
Режим совместимости с токовой петлей 4-20 мА в соответствии с рисунком 4.1.7. Обычно в этом режиме датчик работает в аналоговых АСУТП, а обмен данными по HART-протоколу осуществляется через HART-коммуникатор или компьютер. При этом можно удаленно осуществлять полную настройку и конфигурацию датчика на расстоянии до 3000 м. Таким образом, оператору не нужно обходить все датчики на предприятии, он может настроить их все непосредственно со своего рабочего места.
В многоточечном режиме датчик работает в режиме только с цифровым выходом. Аналоговый выход автоматически устанавливается в 4 мА и не зависит от входного сигнала. Информация об измерительном сигнале считывается по HART-протоколу. К одной паре проводов может быть подключено до 15 датчиков. Их количество определяется длиной и качеством линии, а также мощностью блока питания датчиков. Каждый датчик в многоточечном режиме имеет свой уникальный адрес от 1 до 15, и обращение к датчику идет по этому адресу. Коммуникатор или АСУТП определяет все датчики, подключенные к линии, и может работать отдельно с каждым из них в соответствии с рисунком 4.1.8.