

М инистерство транспорта Росс ийской
Федерации
Фе деральное агентство железнодорожного
транспорта
Сибирский государствен ный университет путей сообщения (НИИЖТ)
Погрузочно-разгрузочные ма шины
перио дического действия
Учебно-методическое пособие для практических з анятий и курсового проект ирования по дисциплине «Транспортно- грузовые системы»
Новосибирск 2010
УДК 656.2 Р 693
Романов В.А., Корнеев М.В., Тесленко И.О.
Погрузочно-разгрузочные машины периодического действия: Учебно-методическое пособие для практических
занятий и курсового проектирования по дисциплине «Транспортно-грузовые системы». – Новосибирск: Изд-во СГУПСа, 2010. – 50 с.
Содержит технико-эксплуатационные характеристики основных типов погрузочно-разгрузочных машин периодического действия, применяемых на транспортно-складских комплексах железных дорог и промышленных предприятий. Даны
принципиальное устройство и принцип действия современных электро- и автопогрузчиков, штабелеров, кранов (мостовых, козловых, стреловых) и вагоноопрокидывателей.
Предназначено для использования в курсовом и дипломном проектировании студентами факультетов УПП, СДМ, УП, ИЭФ, заочного факультета, а также слушателями ИПТТиПК.
Рассмотрены и рекомендованы к печати на заседании кафедры «Логистика, коммерческая работа и подвижной состав».
Ответственный редактор: д-р техн. наук, проф. А.М.
Островский
Рецензент:
Доц. кафедры «Механизация путевых, погрузочно- разгрузочных и строительных работ» СГУПСа канд. техн. наук, А.П. Ткачук.
СОДЕРЖАНИЕ |
|
ВВЕДЕНИЕ………………………………...………………………………….. |
3 |
1 КЛАССИФИКАЦИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ МАШИН……… |
4 |
2ПОГРУЗЧИКИ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ И ШТАБЕЛЕРЫ……. 5
2.1Общие сведения………………………………………………………….... 5
2.2Электропогрузчики………………………………………………………... 8
2.3Автопогрузчики……………………………………………………………. 13
2.4Cамоходные ковшовые погрузчики………………………………...……. 18
2.5Штабелеры………………………………………………….……………… 20
3КРАНЫ ………………………………………………………………………... 23
3.1Общие сведения и область применения……………………………….... 23
3.2Мостовые краны………………………………………………………….. 24
3.3Козловые краны………………………………………………………….. 27
3.4 Стреловые краны………………………………………………………… 33
4 ВАГОНООПРОКИДЫВАТЕЛИ……………………………………………… 40
4.1 Общие сведения………………………………………….………………… 40
4.2 Устройство и принцип действия вагоноопрокидывателей……...……… |
41 |
4.3 Технико-эксплуатационные характеристики вагоноопрокидывателей... |
49 |
СПИСОК ЛИТЕРАТУРЫ……………………………………………………….. |
50 |
ВВЕДЕНИЕ
Инженер по управлению перевозками на железнодорожном транспор- те должен знать устройство, принцип работы, основные технико- эксплуатационные характеристики и сферу применения погрузочно- разгрузочных машин.
По основным технико-эксплуатационным характеристикам все средст- ва механизации погрузочно-разгрузочных работ (ПРР) на транспорте могут быть разделены на [1]:
1)самоходные погрузчики периодического действия:
-средства напольного транспорта;
-одноковшовые погрузчики;
2)погрузчики непрерывного действия (конвейерного типа);
3)краны, оборудованные грузозахватными устройствами;
4)вагоноразгрузочные машины для выгрузки насыпных, порошко- образных и мелкокусковых грузов;
5)вспомогательные средства механизации ПРР.
В данной работе рассмотрены машины периодического действия, т.е. такие машины (установки) у которых грузонесущий орган перемещает груз поштучно или порциями, периодически останавливаясь для захвата и осво- бождения груза (электро- и автопогрузчики, краны, вагоноопрокидыватели).
3

1 КЛАССИФИКАЦИ Я ПОГРУЗОЧНО-РАЗГРУЗОЧНЫ Х МАШИН
Погрузочно-разгруз очные машины (ПРМ) используются на ж.-д. транспорте для производства грузовых операций, а именно: п огрузка грузов в вагоны и на другие транспортные средства (автомобили, су да и др.); вы- грузка грузов их из ваго нов; перегрузка, сортировка грузов (контейнерных и мелких отправок, штучных и тяжеловесных грузов); перев алка грузов с одного транспорта на др угой.
Выбор средств меха низации погрузочно-разгрузочных работ (ПРР) на транспортно-складских к омплексах определяется следующими факторами:
-вид груза и его физико-механические свойства;
-тип транспортных средств;
-объем выполняемы х работ.
ПРМ классифициру ются по следующим основным призн акам (рис. 1):
1)по характеру движения грузонесущего
(рабочего) органа
2)по сфере применения
Классификация |
3) по мобильности |
ПРМ |
4)по типу ходовой части
5)по типу силовой установки
Рисунок 1 – Признаки классификации ПРМ
По характеру движения грузонесущих (рабочих) органов ПРМ подраз- деляются на два больших класса (рис.2).
по характеру
движения ПРМ грузонесущего
(рабочего) органа
|
периодического |
машины непрерывного |
КЛАССЫ |
(ц иклического) или |
или почти неп рерывного |
ма шины прерывного |
||
|
д ействия (МПД) |
действия ( МНПД) |
|
|
Рис унок 2 – Классификация ПРМ
4

К МПД относят такие машины (установки), у которых грузонесущий орган перемещает груз поштучно или порциями, периодическии останавлива- ясь для захвата и освобож дения груза.
Работа МПД характ еризуется периодом (рабочим циклом). Период (ра- бочий цикл) – время от з ахвата единицы (порции) груза до захвата следую- щей единицы (порции) г руза. Он состоит из следующих операций: захват груза, передвижение ПРМ с грузом (груженый рейс), освобождение груза и передвижение ПРМ в порожнем состоянии за следующей порцией груза (по- рожний рейс) (рис.3). Вре мя цикла Тц обычно измеряется в секундах.
Захват
(застропка,
зачерпывание)
груза
ПОРОЖНИЙ |
|
|
|
|
|
ГРУЖЕНЫЙ |
|
|
Время цикла – |
|
|
||
РЕЙС |
|
|
Тц , с |
|
|
РЕЙС |
|
|
|
|
|
|
|
Освобождение
(отст ропка, высыпание)
Рисунок 3 – Схема рабочего цикла Класс машин перио дического действия (МПД) состоит из трех под-
классов – погрузчики и шт абелеры, краны, вагоноопрокидыватеели (табл. 1).
2 ПОГРУЗЧИКИ ПЕРИ ОДИЧЕСКОГО ДЕЙСТВИЯ И ШТАБЕЛЕРЫ
2.1 Общие сведен ия
Современные склады и производство не могут обойтись без штабелё- ров и погрузчиков периодического действия или машин напольного безрель- сового транспорта (МНБТ) [1], которые обладают большой маневренностью, хорошими эксплуатационными показателями. Наиболее эффективно они ис- пользуются для переработ ки пакетных, контейнерных, а также сыпучих гру- зов. К МНБТ относят:
5

Таблица 1 – Характеристика машин периодического действия |
|
|
|
|
||||
ПОДКЛАСС |
|
погрузчики |
|
краны |
|
|
вагоно- |
|
ПРМ |
|
|
|
|
||||
периодического действия |
|
|
|
|
опрокидыватели |
|||
|
|
|
|
|
||||
ОСНОВНЫЕ |
o электро- |
oавтопо- |
o тракторные |
o козловые |
o стреловые |
o стеллажные краны |
o роторные |
|
ХАРАКТЕРИСТИКИ |
погрузчики |
грузчики |
|
o мостовые |
|
o краны-штабелеры |
o боковые |
|
|
ü вилы |
|
üковш |
ü 4х-звенный строп, тросы |
ü вилы |
ü ротор |
||
|
ü штырь |
|
|
ü полуавтоматические захваты |
|
|
|
|
ГРУЗОНЕСУЩИЙ |
ü кантователь |
|
ü грейфер |
|
|
|
|
|
ОРГАН |
ü ковш |
|
|
ü ковш |
|
|
|
|
|
|
|
|
ü автостроп |
|
|
|
|
|
|
|
|
ü спредер |
|
|
|
|
СФЕРА |
|
|
|
ü универсальные |
|
|
ü специальные |
|
|
|
|
|
|
|
|
|
|
ПРИМЕНЕНИЯ |
|
|
|
|
|
|
|
|
|
|
|
|
ü передвижные |
|
|
ü стационарные |
|
МОБИЛЬНОСТЬ |
|
|
|
|
|
|
|
ü передвижные |
|
ü электро- |
ü двигатель внутреннего |
ü электро- |
ü дизель |
|
ü электродвигатель |
||
СИЛОВАЯ УСТАНОВКА |
двигатель |
сгорания на жидком топ- |
двигатель |
ü электродвига- |
|
|
|
|
|
|
ливе (дизель) или на газе |
|
тель |
|
|
|
|
|
ü колесный ход |
ü гусеничный |
ü рельсо- |
ü колесный ход |
ü |
рельсовый ход |
- |
|
ХОДОВАЯ |
|
|
ход |
вый ход |
ü рельсовый ход |
ü |
колесный ход |
|
ЧАСТЬ |
|
|
ü колесный |
|
|
|
|
|
|
|
|
ход |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
1)универсальные электропогрузчики (ЭП), грузоподъемностью от 0,5 до 3,5т – применяют для перегрузочных работ в закрытых складах с расстоя- нием транспортировки грузов до 120 м;
2)универсальные автопогрузчики (АП), грузоподъемностью от 3 до 60т – применяют для работы на открытых площадках с расстоянием транс- портировки грузов до 200 м;
3)универсальные малогабаритные АП с нейтрализацией выхлопных газов, грузоподъемностью от 1 до 3т – применяют для работы в закрытых складах с расстоянием транспортировки грузов до 120 м;
4)погрузчики с фронтальным (часто выдвижным) грузоподъемником или электроштабелеры, грузоподъемностью от 0,5 до 2т – применяют при внутрискладских работах, они более маневренны, но уступают по скорост- ным характеристикам и проходимости универсальным погрузчикам, расстоя- ние перемещения грузов до 50 м, высота подъема груза 6-8 м и до 15 м в спе- циальном исполнении – ричтрак (ретрак);
5)погрузчики с боковым (часто выдвижным) грузоподъемником, ма- лой грузоподъемности до 3 т - ЭП, большой грузоподъемности 40-60 т - АП – используют для перегрузки длинномерных грузов (пиломатериалы, прокат, ЖБИ) и крупнотоннажных контейнеров с расстоянием транспортировки до
1000 м;
6)портальные погрузчики-контейнеровозы – используют для пере-
грузки и транспортирования крупнотоннажных контейнеров на расстояния 500-1000 м, при высоте штабелирования в 2- или 3- яруса;
7)специальные погрузчики большой грузоподъемности: ричстакеры – предназначены для работы с крупнотоннажными контейнерами; мультиста- керы – для других тяжеловесных и массовых грузов, которые возможно пе- рерабатывать автоматическими захватами;
8)электротележки и тягачи – используют для перемещения грузов на расстояние от 100 м.
МНБТ могут иметь управление с пола (пультовое) или из кабины (ру- левое).
Наибольшее распространение получили универсальные электро- и ав- топогрузчики, которые подразделяют на:
- длиннобазовые – улучшенной проходимости (используются для ра- боты на грунте);
- короткобазовые – малогабаритные (используются на складах с твер- дым покрытием).
7

2.2 Электропогрузчики
2.2.1 Область применения. Электропогрузчики (ЭП) (рис. 4) предпоч- тительнее использовать в закрытых помещениях с твердым покрытием, для
Рисунок 4 – Принципиальная схема ЭП
8
выполнения ПРР в стесненных условиях внутри складов, крытых вагонов, крупнотоннажных контейнеров и трюмах судов. Перерабатываемые грузы – штучные и тарно-штучные (ТШГ) в пакетах на поддонах и без поддонов.
2.2.2 Устройство. Ходовая часть ЭП состоит из двух мостов: управ- ляемого заднего (1) и ведущего (приводного) переднего (2). В стесненных условиях применяют трехопорные погрузчики (с одним задним колесом). Колеса пневматические, но чаще бескамерные – металлический обод, покры- тый слоем резины или бескамерные «суперэластик». Оснащается ЭП обычно вилочным захватом (3), но иногда в комплект входят и другие сменные гру- зозахватные приспособления (штырь, кантователь, боковые захваты и др.), которые предназначены для автоматического захвата груза (4). Захват наве- шивается на подвижную каретку (5), которая передвигается «вверх-вниз» по грузоподъемной телескопической раме (6) – основному рабочему органу ЭП.
Рама может наклоняться назад (на 100) и вперед (на 30).
Для водителя предусмотрено сиденье (8), кабина, как правило, отсутст- вует. Источник энергии – комплект аккумуляторных батарей (9), которые пи- тают два электрических двигателя (передвижения погрузчика и управления рабочим органом). Кузов погрузчика располагается на сварной раме (10) с противовесом (11).
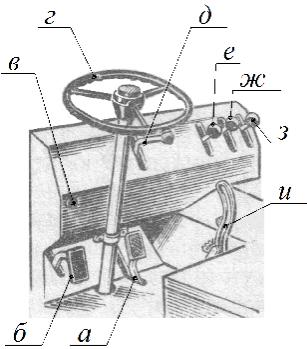
К основным аппаратам управления погрузчиком и гидросистемой (7) относятся: руль-штурвал, педали командоконтроллера, ножного тормоза, ру- коятки управления рамой и кареткой (рис. 5).
Условные обозначения:
а – педаль управления скоростью; б – педаль ножного тормоза; в – замок блокировки; г – штурвал; д – рычаг реверса;
е, ж, з – рукоятки управления рабо-
той гидроцилиндров соответственно подъема, наклона и сменного рабоче- го оборудования; и – рукоятка стояночного тормоза.
Рисунок 5 – Пульт управления ЭП
9