

2.4. Анализ процессов регулирования
Проведём анализ процессов регулирования с помощью системы Matlab и ее подсистемы Simulink, для оценки выполнения требований ТЗ к точности привода и качеству переходных процессов.
Экспериментальная модель системы показана в Приложении 1.
Зададим параметры системы:
>> Ra=0.65;
>> Te=0.00035;
>> Ke=0.18;
>> Km=Ke;
>> Js=0.341e-3;
>> Kspr=4.2;
>> Kost=0.52;
>> Tmu=2.5e-4;
>> Krt=0.2;
>> Kit=1/Te;
>> Koss=0.0429;
>> Krs=11.37;
>> Kis=123.75;
>> Kosp=20382.17;
>> Krp=0.000347;
>> Trp=0.0359;
Исследуем реакцию системы на единичное ступенчатое воздействие (рис. 13).
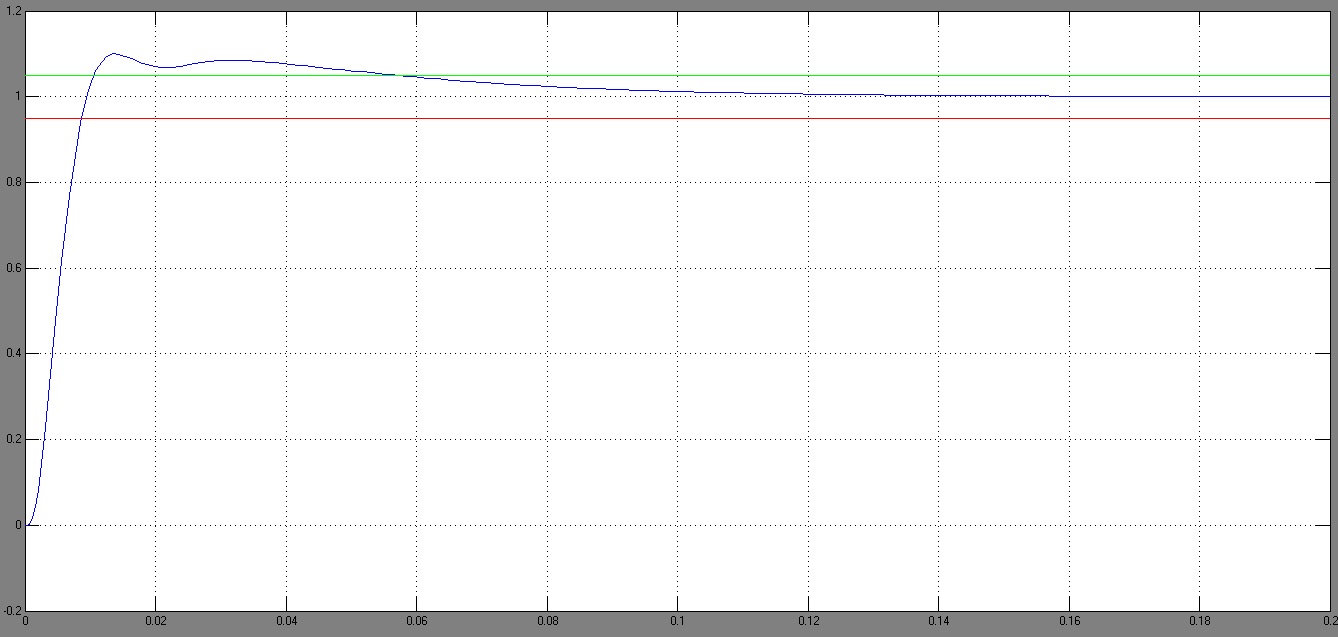
Рис.13. Реакция системы на единичное ступенчатое воздействие.
Анализируя
график, видно, что Тпп
= 0,058 с, а перерегулирование:
 .
.
Для
оценки величины скоростной ошибки
подадим на вход системы нарастающее с
постоянной скоростью входное воздействие:
 Реакция системы показана на рис.14.
Реакция системы показана на рис.14.
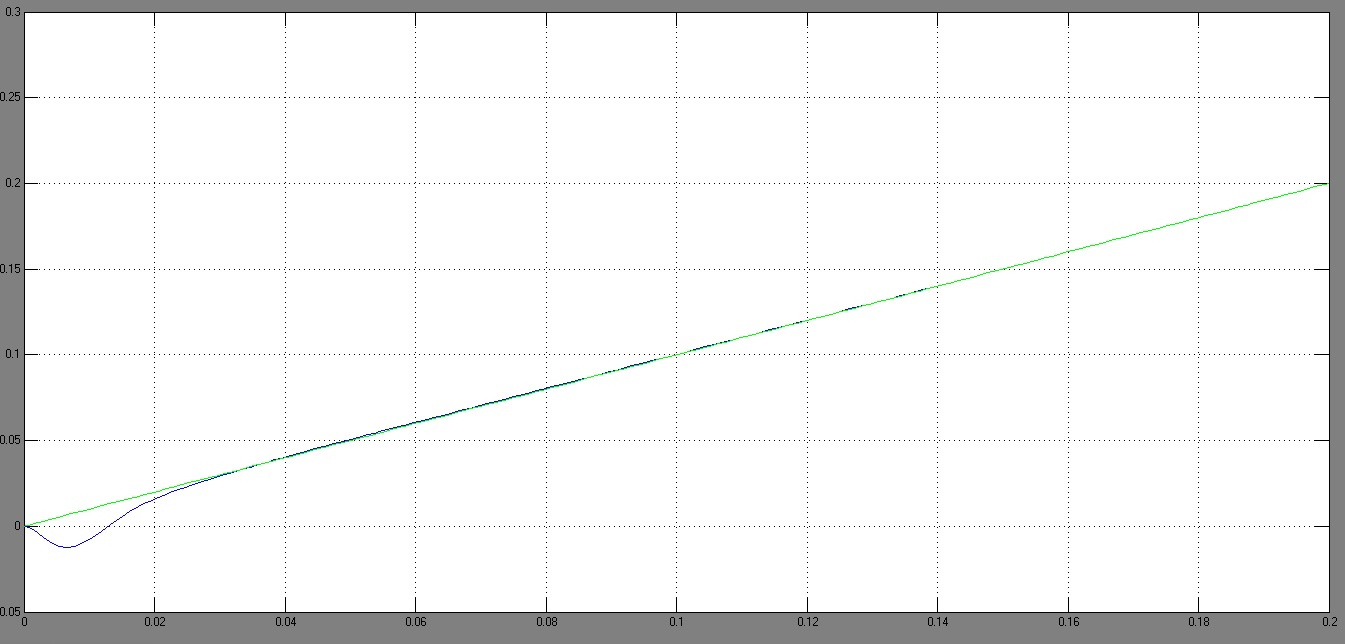
Рис. 14. Реакция системы на нарастающее с постоянной скоростью воздействие.
Из графика определим скоростную ошибку:

Чтобы
оценить динамическую погрешность
системы, подадим на вход гармоническое
воздействие
 .
При этом
.
При этом

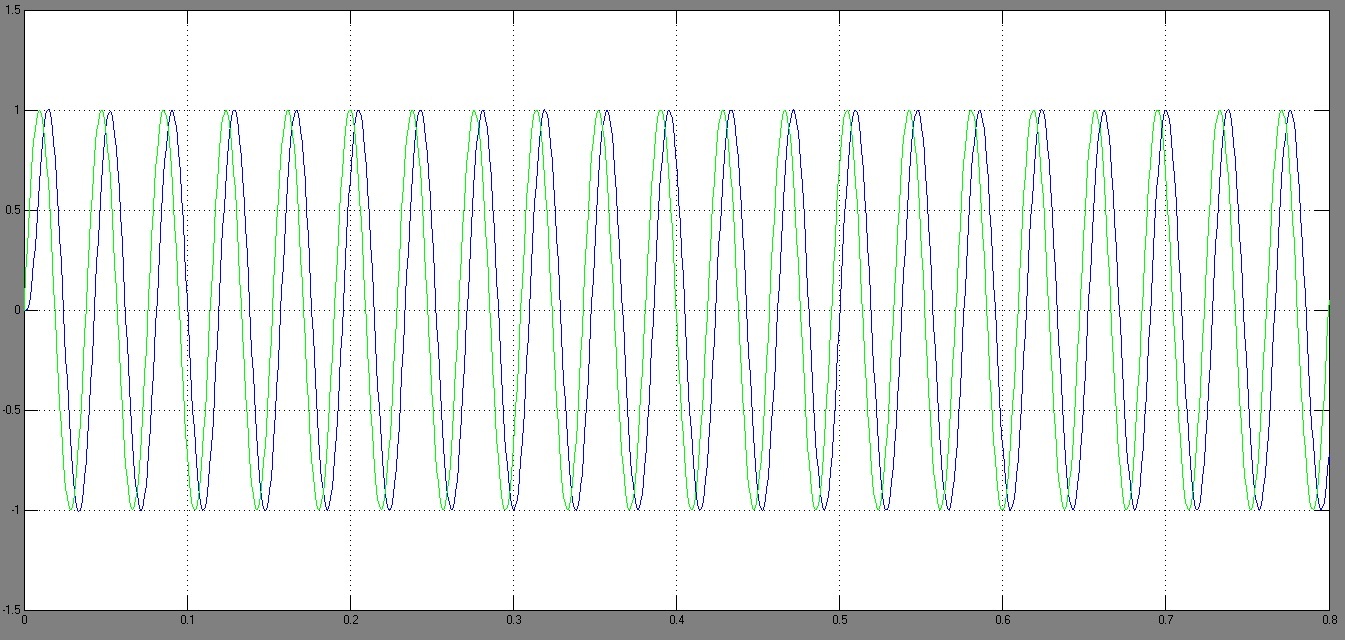
Рис.15. Реакция системы на гармоническое воздействие.
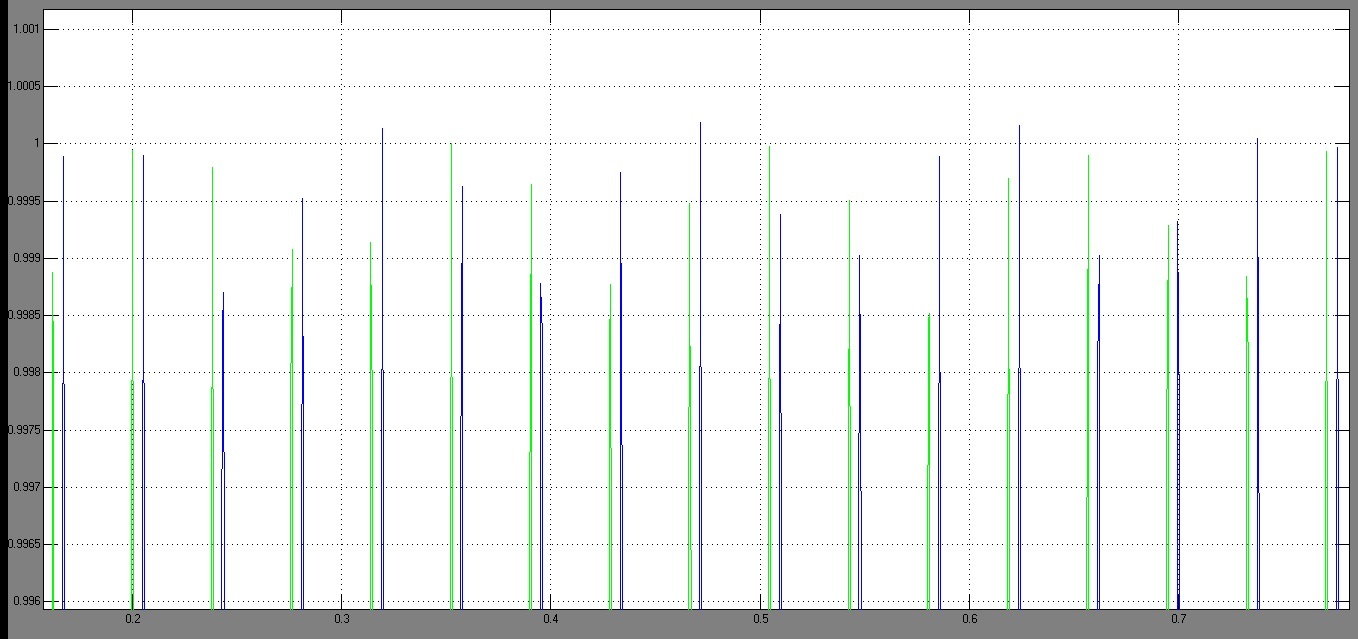
Рис.15. Реакция системы на гармоническое воздействие в увеличении.
Из графика видно, что динамическая ошибка δд = 1,0003 – 0,9985 = 0,0018 рад.
В результате анализа можно сделать вывод, что полученная система удовлетворяет требованиям к следящей системе, так как δд < 0,0019 рад, δск < 0,0019 рад, Тпп < 0,067 и σ < 20%.
2.5. Определение динамической моментной ошибки привода
Динамическая моментная ошибка двигателя определяется по формуле:
 ,
,
где
 - скорость изменения момента;
- скорость изменения момента;
 - коэффициент
моментной ошибки.
- коэффициент
моментной ошибки.

Наибольшая скорость изменения момента наблюдается при вертикальном положении вытянутого манипулятора:

Тогда
с учётом редуктора: 
Динамическая моментная ошибка равна:

Составляющая
погрешности привода, вызванная
динамической моментной ошибкой равна
 .
.
2.6. Проверка соответствия требуемой точности
Уточним значение составляющей динамической ошибки:

После оценки значений всех составляющих погрешности привода, проверим не превышает ли полученное значение допустимого:


Полученные погрешности не превышают допустимых, следовательно, точностные требования к исполнительной системе выполнены.
2.7. Дополнительные требования
1) Для фиксации звеньев в случае аварийного отключения электроэнергии следует установить электромагнитные тормозные устройства на каждом приводе.
2) Для обеспечения работы датчиков положения при аварийном отключении питания следует подключить датчики и контроллер с квадратурным счётчиком к источнику бесперебойного питания.
3) Для работы двигателей постоянного тока от заводской трехфазная электрической сети с напряжением 380 В и частотой 50 Гц, необходимо оснастить мехатронную систему выпрямителем тока.
3. Выводы
В процессе проектирования электромеханического следящего привода исполнительной системы робота были определены двигатели, редукторы, силовые преобразователи в соответствии с требованиями по обеспечению энергетической возможности движения объекта по заданному закону движения с требуемыми зависимостями развиваемых скоростей и усилий. Также был произведен выбор информационных устройств – датчиков обратных связей, которые могут обеспечивать заданную точность привода. Следящий привод работает без тепловой перегрузки. В соответствии с особыми требованиями были рассмотрены вопросы аварийной остановки системы.
Был произведен расчет регуляторов положения, скорости и тока, произведена их настройка и определены коэффициенты датчиков обратных связей для обеспечения требований к исполнительной системе по точности, устойчивости и качеству переходных процессов. Все выбранные в ходе выполнения курсовой работы элементы системы обеспечивают работоспособность при заданных условиях.