

Содержание:
3. Параметры манипуляционного механизма и требования к исполнительной системе робота 5
1. Энергетический расчёт 6
1.1. Выбор двигателя и редуктора привода второго звена 6
1.1.1. Кинематический анализ манипуляционного механизма 6
1.1.2. Силовой анализ манипуляционного механизма 6
1.1.3. Оценка мощности двигателя второго звена 6
1.1.4. Выбор двигателя привода второго звена 6
1.1.5. Определение требуемого передаточного отношения и марки редуктора 7
1.1.6. Проверка правильности выбора двигателя и редуктора 7
1.2. Выбор двигателя и редуктора привода первого звена 7
1.2.1. Кинематический анализ манипуляционного механизма 7
1.2.2. Силовой анализ манипуляционного механизма 8
1.2.3. Оценка мощности двигателя первого звена 10
1.2.4. Выбор двигателя привода первого звена 10
1.2.5. Определение требуемого передаточного отношения и марки редуктора 10
1.2.6. Проверка правильности выбора двигателя и редуктора 11
1.2.8. Тепловой расчёт двигателя первого звена 14
2. Синтез регулятора следящего привода 15
2.1. Анализ точности следящего привода и назначение требования к его компонентам 15
2.2. Выбор датчика положения 16
2.3. Синтез регуляторов следящего привода 16
2.3.1. Конкретизация требований к следящей системе, выбор её структуры 16
2.3.2. Оценка требуемых значений частот среза разомкнутого следящего привода и разомкнутых подсистем 17
2.3.3. Синтез подсистемы регулирования тока 18
2.3.4. Синтез подсистемы регулирования скорости 20
2.4. Анализ процессов регулирования 22
2.5. Определение динамической моментной ошибки привода 25
2.6. Проверка соответствия требуемой точности 25
2.7. Дополнительные требования 25
3. Выводы 26
4. Список использованных источников информации 27
Приложение 28
Согласовано: руководитель _____________Илюхин Ю.В.
Задание на разработку и исследование электромеханического следящего привода робота
Разработать электромеханический следящий привод «плечевой» степени подвижности двухзвенного плоского манипулятора робота, кинематическая схема которого изображена на рис. 1.
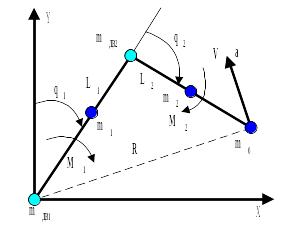
Рис
1. Расчётная кинематическая схема
манипуляционного механизма.
На рис.1 приняты следующие обозначения:
 и
и
 - обобщённые координаты манипуляционного
механизма;
- обобщённые координаты манипуляционного
механизма;
 и
и
 - длины «плечевого» и «локтевого»
звеньев, соответственно;
- длины «плечевого» и «локтевого»
звеньев, соответственно;
 и
и
 - массы «плечевого» и «локтевого»
звеньев, соответственно;
- массы «плечевого» и «локтевого»
звеньев, соответственно;
 - суммарная масса
рабочего органа и объекта манипулирования;
- суммарная масса
рабочего органа и объекта манипулирования;
 и
и
 - массы исполнительных двигателей;
- массы исполнительных двигателей;
 и
и
 - скорость и ускорение конечной точки
манипулятора;
- скорость и ускорение конечной точки
манипулятора;
 - расстояние от
оси вращения «плечевого» звена до
конечной точки манипулятора;
- расстояние от
оси вращения «плечевого» звена до
конечной точки манипулятора;
 и
- моменты сил, развиваемые приводами и
действующие на звенья манипулятора.
и
- моменты сил, развиваемые приводами и
действующие на звенья манипулятора.
1. Основные требования
Разработка следящего привода должна быть выполнена в соответствии с техническим заданием (ТЗ), которое разрабатывает проектант и согласует с руководителем курсовой работы. Требования к проектируемому следящему приводу должны быть сформированы и зафиксированы в ТЗ на основании исходных требований к исполнительной системе робота и характеристик манипуляционного механизма, представленных в табл.1 и табл.2 соответственно, а также с учётом результатов проведённых предпроектных исследований.
Следящий привод должен быть построен на базе коллекторного двигателя постоянного тока. Исполнительная часть привода состоит из двигателя, механической передачи и силового преобразователя, работающего в режиме широтно-импульсной модуляции.
Робот управляется системой контурного управления.
Следящий привод должен функционировать без тепловой перегрузки при эквивалентном рабочем цикле, включающем два характерных этапа движения. На первом этапе эквивалентного рабочего цикла происходит "переброска", т.е. быстрое перемещение рабочего органа из исходного положения в заданное конечное положение. При этом график зависимости развиваемой двигателем скорости от времени принимается в виде трапеции или треугольника. На втором этапе движения, когда выполняется требуемая основная технологическая операция, следящий привод функционирует в основном рабочем (следящем) режиме. На втором этапе за основу должен быть принят эквивалентный гармонический закон движения вала двигателя. Предельное значение отношения длительности первого этапа движения к длительности эквивалентного рабочего цикла задано в виде относительной длительности режима "переброски", указанной в табл.1.
При проектировании учесть погрешности, обусловленные дискретностью датчиков, кинематическими погрешностями механических передач, действием внешних сил и динамическими свойствами следящей системы.
Если при проведении предпроектных исследований или в процессе проектирования следящего привода выявится необходимость изменения исходных требований или значений показателей качества исполнительной системы, такие изменения могут быть произведены только при согласии руководителя курсовой работы, но не позднее, чем за один месяц до начала зачётной недели.