

18. Интегральные оценки качества переходных процессов: линейные, квадра-тичные.
Методы интегральной оценки качества САУ дают общую оценку отклонения регулируемой величины в установившемся режиме (точности установившегося режима) и быстроты затухания переходных процессов в совокупности (одним числом) без определения того и другого в отдельности.
Они
основаны на применении функциональных
оценок вида -![]() где x(t)
–
отклонение управляемой (регулируемой)
величины
от установившегося значения, F
- некоторый функционал.
где x(t)
–
отклонение управляемой (регулируемой)
величины
от установившегося значения, F
- некоторый функционал.
Вид функционала зависит от вида переходного процесса. Устойчивые переходные процессы, возникающие при ступенчатом воздействии, принято делить на три группы (рис. 1):
- монотонные, где первая производная выходной величины по времени не меняет знак;
- апериодические, где производная меняет знак не более одного раза;
- колебательные, где производная меняет свой знак периодически.
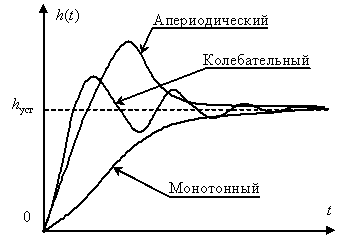
Рис. 1
Простейшей
интегральной оценкой, используемой для
монотонных переходных процессов,
является оценка вида -
![]() ,
где X(s)
– изображение x(t)
по Лапласу. Геометрически данная оценка
равна площади под кривой переходного
процесса, построенной для отклонения
регулируемой величины.
,
где X(s)
– изображение x(t)
по Лапласу. Геометрически данная оценка
равна площади под кривой переходного
процесса, построенной для отклонения
регулируемой величины.
Рассмотрим
проблему вычисления интеграла линейной
интегральной оценки. Можно сначала
решить аналитически дифференциальные
уравнения, описывающие систему, далее
определить ошибку регулирования, затем
подставить выражение для ошибки в
интеграл линейной оценки и, взяв его,
получить выражение для
![]() .
.
Интегральные оценки качества
Интегральные оценки представляют собой определённые интегралы (в пределах от 0 до ¥) от функций времени x(t), характеризующих течение переходных процессов в системе.
Функция
x(t)=y(t)-y(¥)
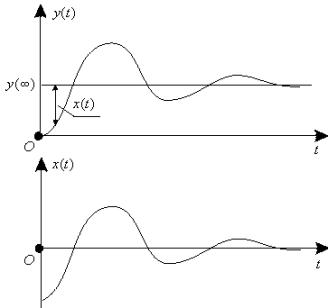
Рис. 14. Переходные процессы
Метод интегральных оценок относится к аналитическим. Качество процессов характеризуются интегралами, величины которых связаны с параметрами системы.
Находят применение:
а)
линейные интегральные оценки:
![]()
б)
квадратичные интегральные оценки:
![]()
в)
обобщённые квадратичные оценки:
![]()
где V(t) - квадратичная форма от координат .
19. Типовые линейные законы регулирования. Виды регуляторов.
Законы регулирования
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U = f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Закон регулирования определяет основные качественные и количественные характеристики систем.
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон и регулятор в этом случае называют П- регулятором. При этом U = U0+kD , где U0-постоянная величина, k - коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока о коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами.
Интегральный
закон регулирования и соответствующий
И- регулятор реализует следующую
зависимость:
где Т -постоянная времени интегрирования.
Техническая реализация И-регулятора представляет собой усилитель постоянного тока с емкостной отрицательной обратной связью. И-регуляторы обеспечивают высокую точность в установившемся режиме. Вместе с тем И-регулятор вызывает уменьшение устойчивости переходного процесса и системы в целом.
Приведены описания алгоритмов работы и законы регулирования релейных(позиционных) регуляторов. Релейные (позиционные) регуляторы выдают сигнал, который обеспечивает перемещение регулирующего органа в одно из фиксированных положений (позиций). Их может быть два, три и более. По количеству позиций различают двух-, трех- и многопозиционные регуляторы. Кратко описаны алгоритмы работы и законы регулирования непрерывных П-, ПИ-, ПИД-регуляторов.