

36. Точная остановка подъемных машин. Автоматическое регулирование положения.
Х – уровень пола кабины при точной
остановке;
– уровень пола кабины при точной
остановке;
Х1 – уровень пола при недоподъеме;
Х2 – уровень пола при переподъеме;
ДТО – датчик точной остановки;
У – упор.
При подходе кабины
к этажной площадке происходит переключение
путевого датчика точной остановки
упором на кабине, и в схему управления
поступает командный импульс. После
срабатывания датчика кабина будет
двигаться некоторое время с номинальной
скоростью, пока не сработают аппараты,
отключающие двигатель и не сработает
механический тормоз. Кабина при этой
скорости пройдет путь:![]() ,
,![]() -
суммарное время работы аппаратов. Далее
начинается торможение кабины. За это
время она проходит путь:
-
суммарное время работы аппаратов. Далее
начинается торможение кабины. За это
время она проходит путь: ;
;
 ;-кин.энерг.
в движ.частях лифта;
;-кин.энерг.
в движ.частях лифта;
![]() -
масса всех движущихся частей подъемника,
приведенная к скорости движения
кабины;
-
масса всех движущихся частей подъемника,
приведенная к скорости движения
кабины;![]() -тормозное
и статическое усилия, приведенные к
скорости движения кабины;
-тормозное
и статическое усилия, приведенные к
скорости движения кабины;
Выражение для пути
пройденного кабиной с момента воздействия
на ДТО до полной остановки:
 ;
;

![]() -
среднее возможное значение пути.
-
среднее возможное значение пути.
ДТО устанавливается
на расстоянии
от уровня пола, поэтому максимальная
неточность остановки кабины характеризуется
величиной
![]()
Автоматическое регулирование положения.
Процесс точной остановки кабины происходит в 2 этапа: на первом этапе происходит замедление от рабочей скорости до пониженной, на втором этапе рабочий орган механизма входит в зону автоматического контроля положения и система регулирования устанавливает его в заданное положение с требуемой точностью.
Схема расстановки датчиков контроля положения кабины и релейная схема выравнивания:
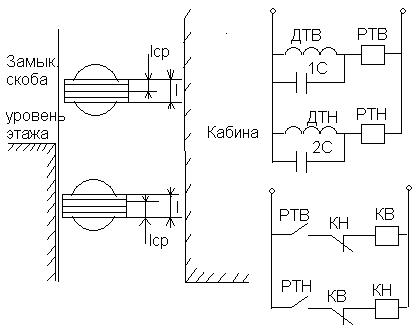
Индуктивные датчики
ДТВ и ДТН расположенные на кабине у
уровня точной остановки замыкаются
скобой. При этом сигналы на выходе ДТВ
и ДТН имеют наименьшие значения и равные
друг другу. При опускании кабины вниз
на расстояние l
магнитопровод ДТВ размыкается и на его
выходе сигнал максимален. При подъеме
на расстояние l
максимален сигнал на выходе ДТН. Датчики
ДТВ и ДТН могут быть использованы для
управления релейной системой контроля
положения либо могут быть включены в
непрерывную схему контроля положения
дающую зависящий от положения кабины
сигнал,
![]() который
воздействует на систему автоматического
регулирования положением. На выход ДТВ
и ДТН подключены реле РТВ и РТН.
который
воздействует на систему автоматического
регулирования положением. На выход ДТВ
и ДТН подключены реле РТВ и РТН.

![]()
Схема непрерывного контроля положения кабины
38. Общепромышленные механизмы непрерывного действия. Конвейеры (определение, общие сведения, классификация, кинематические схемы).
Общепромышленные механизмы непрерывного действия-механизмы с режимом работы, при котором технологический процесс состоит из непрерывных не повторяющихся циклов. К таким механизмам относятся: конвейеры, эскалаторы, кольцевые канатные дороги, многокабинные подъемники, насосы, вентиляторы, компрессоры, воздуходувки.
Конвейеры (транспортеры) - механизмы непрерывного транспорта, предназначенные для транспортировки грузов, изделий, продукции внутри цехов и между ними. Конвейеры подразделяются на ленточные, подвесные, роликовые и т.д.
Кинематическая схема ленточного конвейера.

Тяговым органом является лента, прорезиненная, стальная, изготовленная из текстиля. Данная лента надевается на ведущий и ведомый барабан. Ведущий барабан приводится во вращение через механическую передачу (цепная или ременная) к двигателю. Для устранения провисания ленты вдоль нее устанавливают поддерживающие ролики. Ведомый барабан имеет перемещающиеся по направляющим подшипники, которые связаны с механизмом натяжения. Механизм натяжения состоит из отводного шкива и груза связанного канатом. Груз обеспечивает необходимое натяжение ленты в процессе эксплуатации конвейера при изменении нагрузки.

Кинематическая схема подвесного конвейера
Тяговым органом является цепь или канат, который связан с кареткой, которая перемещается в горизонтальной плоскости непрерывно. Цепь через звезду приводится во вращение двигателем. Перемещающиеся груза подвешиваются на спец. Подвесках. Каретки на роликах движутся по монорельсу.