

25. Статические и динамические нагрузки электроприводов подъемников и тяговых лебедок Кинематическая схема одноконцевой подъемной лебедки
П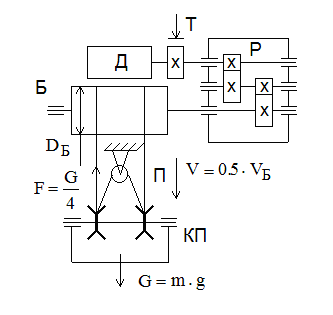 одъемная
или тяговая лебедка предназначена для
передачи усилий от привода к рабочему
органу с помощью подъемного или тягового
каната соответствующей длины. По принципу
работы лебедки подразделяются на:
одноконцевые и двухконцевые, а по
конструкции органа навивки каната на:
барабанные лебедки и лебедки с
канатоведущими шкивами.
одъемная
или тяговая лебедка предназначена для
передачи усилий от привода к рабочему
органу с помощью подъемного или тягового
каната соответствующей длины. По принципу
работы лебедки подразделяются на:
одноконцевые и двухконцевые, а по
конструкции органа навивки каната на:
барабанные лебедки и лебедки с
канатоведущими шкивами.
КП – крюковая подвеска
П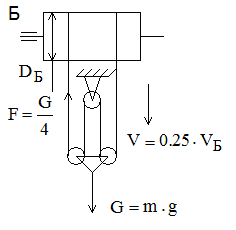 – полиспаст – это грузоподъемное
устройство из нескольких подвижных и
неподвижных блоков, огибаемых тросом
или канатом. Служит для подъема тяжелых
грузов. Вес поднимаемого груза
распределяется на несколько ветвей
троса, число которых зависит от числа
блоков. Поэтому к тяговому концу троса
прикладывается сравнительно малое
усилие.
– полиспаст – это грузоподъемное
устройство из нескольких подвижных и
неподвижных блоков, огибаемых тросом
или канатом. Служит для подъема тяжелых
грузов. Вес поднимаемого груза
распределяется на несколько ветвей
троса, число которых зависит от числа
блоков. Поэтому к тяговому концу троса
прикладывается сравнительно малое
усилие.
Если не учитывать потери на трение, то приведенный к валу двигателя момент определяется по следующей формуле:

![]() - вес груза, имеющий
массу m
- вес груза, имеющий
массу m
![]() - вес грузозахватывающего
устройства, массой
- вес грузозахватывающего
устройства, массой
![]()
![]() - передаточные
отношения редуктора и полиспаста
- передаточные
отношения редуктора и полиспаста
Момент груза является активным моментом, направленным в сторону спуска. Он изменяется при изменении веса поднимаемого груза, но не зависит от напряжения двигателя. Момент статической нагрузки при номинальном грузе:
![]()


![]()
![]() - учитывает
- учитывает
![]() всех звеньев кинематической цепи.
всех звеньев кинематической цепи.
Для режима спуска
номинального груза:
![]()
Статический момент при подъеме пустого грузозахватывающего устройства:
![]()

![]()

Статический момент при спуске пустого грузозахватывающего устройства:
![]()
Момент нагрузки двигателя в зависимости от веса грузозахватывающего устройства может быть: движущим и тормозным.
При тяжелом грузозахватывающем устройстве:

![]()
![]() является движущим
(тормозной спуск) и при
является движущим
(тормозной спуск) и при
![]()

Если грузозахватывающее устройство легкое:

![]()
тогда
![]()
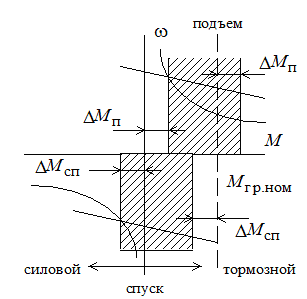
Нагрузки подъемных лебедок при подъеме и спуске
Определение статических нагрузок необходимо для построения нагрузочных диаграмм, выбора мощности двигателя и проверки его по нагреву. Характер нагрузок и пределы их изменений в значительной степени определяют режимы работы и выбора схемы электропривода.
Динамич. момент двигателя при заданном ускорении, кот. ограничен технологич.условиями м.б. определен

26. Статические и динамические нагрузки электроприводов механизмов передвижения и поворота (кинематическая схема, основные выражения)
К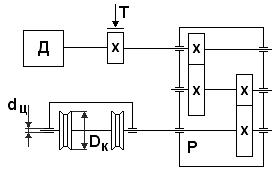 инематическая
схема механизма передвижения:
инематическая
схема механизма передвижения:
DК – диаметр колеса
dЦ – диаметр подшипников колес
Д – двигатель
Т – тормоз
Р – редуктор
К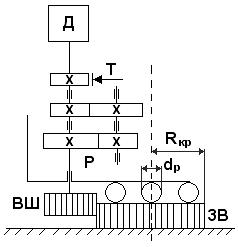 инематическая
схема механизма поворота:
инематическая
схема механизма поворота:
Платформа с оборудованием.
ВШ – шестерня ведущая
ЗВ – зубчатый венец
dР – диаметр роликов
![]() -
радиус роликового круга;
-
радиус роликового круга;
Для механизмов передвижения, работающих на горизонтальном пути в производственном помещении, момент статической нагрузки приведён к валу двигателя, определяется следующим образом:

G0’ – общий вес незагруженного механизма
kР – коэффициент учитывающий трения реборд колес о рельсы.
µ – коэффициент трения в опорах ходовых колес
dЦ – диаметр цапф (подшипников колес)
f – коэффициент трения-качения ходовых колес
ŋМ – КПД передачи механизмов
Статический момент
поворота при горизонтальном положении
платформы и отсутствии ветра определяется:
 ,
где DКР
– диаметр роликового круга, dP
– диаметр роликов, kР
– коэффициент, учитывающий трение
реборд колес о рельсы.
,
где DКР
– диаметр роликового круга, dP
– диаметр роликов, kР
– коэффициент, учитывающий трение
реборд колес о рельсы.
Нагрузка механизмов передвижения поворота без учёта ветровой нагрузки и уклона:
Сила сопротивления движения для механизмов передвижения при наличии уклона или наличии ветра, определяется:
![]() F
– сила сопротивления движения
F
– сила сопротивления движения
FК – сила трения-качения колеса по рельсам
F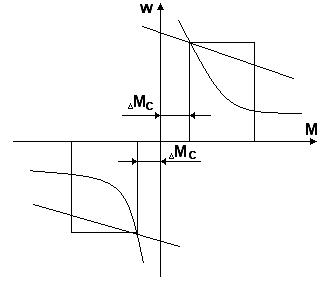 Ц
– сила трения в цапфах
Ц
– сила трения в цапфах
FТ. РЕБ. – сила трения реборд колес о рельсы
FВ – сила давления встречного воздуха
FГ – дополнительное усилие от негоризонтальности поверхности
![]() ,
где РВ=(150÷200)
U/м2
– ветровое давление, SB
– площадь парусности машины.
,
где РВ=(150÷200)
U/м2
– ветровое давление, SB
– площадь парусности машины.
![]() ,
где kСП=(0,3÷0,6)
–для ферм и
kСП=(0,7÷0,8)
– для механизмов,
,
где kСП=(0,3÷0,6)
–для ферм и
kСП=(0,7÷0,8)
– для механизмов,
kСП – коэффициент сплошности конструкции, SBK – площадь, ограниченная контуром конструкции, SГ – площадь, ограниченная грузом.
Для механизмов
момент
сопротивления
от давления ветра:

Для механизмов
поворота статический
момент обусловленный ветром:
![]() ,
где FВТ
– сила сопротивления от давления ветра
на груз,
,
где FВТ
– сила сопротивления от давления ветра
на груз,
FВК – сила сопротивления от давления на конструкцию; R, L – плечо приложенной силы ветра на поворотную часть.
Момент
статического сопротивления при
произвольном положении поворотной
платформы:
![]() .
.
Средняя величина
статического момента при произвольном
положении поворотной платформы:
![]()
Момент
сопротивления при подъёме по наклонной
плоскости:
![]()
 ;
-угол
наклона плоскости по которой движется
тележка.
;
-угол
наклона плоскости по которой движется
тележка.
Важнейшей
особенностью механизма передвижения
и поворота является большая механическая
инерция. Приведённый к валу двигателя
момент инерции для механизмов передвижения
и поворота крана приблизительно в 20 раз
> собственного момента инерции
двигателя, поэтому для таких механизмов
при большой частоте включений динамической
нагрузки определяют мощность двигателя,
а статические почти не учитываются. В
механизмах перемещения и поворота
необходимо учитывать отсутствие
пробуксовки, это определяется
выражением:![]() -коэф-т
трения колёс о рельсы.
-коэф-т
трения колёс о рельсы.