

Лабораторная работа 4 / Лабораторная работа4
.docСанкт-Петербургский Государственный Электротехнический Университет «ЛЭТИ»
Кафедра АПУ
Отчет
по лабораторной работе №4
по дисциплине «Теория автоматического управления»
«Анализ временных и частотных характеристик дискретных звеньев»
Выполнили:
студенты гр. 4322
факультет КТИ
Миненков Д.В.
Золотарев А.Р.
Проверил:
Имаев Д. Х..
СПб 2007 г.
Цель работы: изучение методов синтеза дискретных систем управления:
-
Дискретный объект второго порядка.
Разностное уравнение:
![]()
-
Анализ устойчивости
Дискретная передаточная функция объекта:
![]()
Проведем анализ по характеристическому полиному:
![]() ,
,
корни которого:
![]()
Один из корней по модулю больше 1, что означает, что объект неустойчив. Т.е. необходим синтез регулятора.
Воспользуемся операторным методом для размещения корней характеристического полинома в единичном круге, при этом потребуем, чтобы процессы имели конечное время затухания, т.е. назначим желаемые корни нулевыми. Их число определяется на этапе структурного синтеза.
Структура системы представлена на рисунке 1:
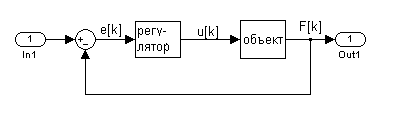
Рис.1. Структура системы.
-
Структурный этап синтеза
![]() - степень числителя равна степени
знаменателя
- степень числителя равна степени
знаменателя
![]() - порядок регулятора.
- порядок регулятора.
![]() - вид дискретной передаточной функции
регулятора.
- вид дискретной передаточной функции
регулятора.
Таким образом, дискретная передаточная функция системы имеет третий порядок, желаемый характеристический полином имеет 3 нулевых корня.
-
Параметрический этап синтеза
Операторный метод синтеза предполагает тождественность характеристического полинома замкнутой системы желаемому полиному.
![]()
Раскроем скобки и найдем коэффициенты передаточной функции регулятора:
![]()
![]()
Из полученного равенства составим систему:
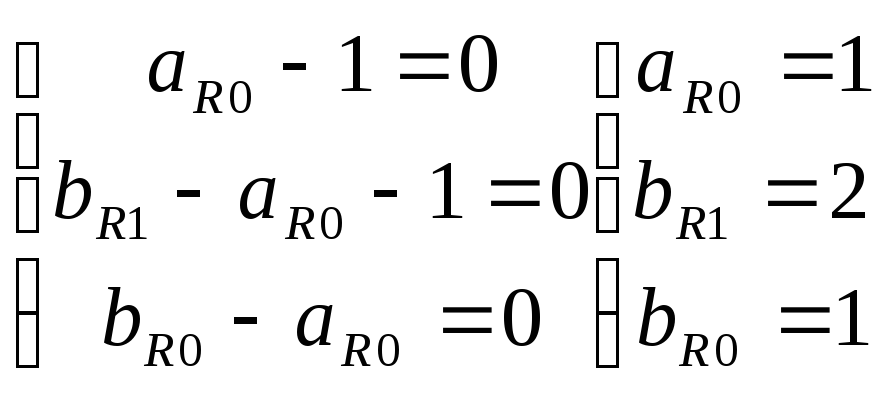
![]()
Если изменить знак обратной связи, получим:
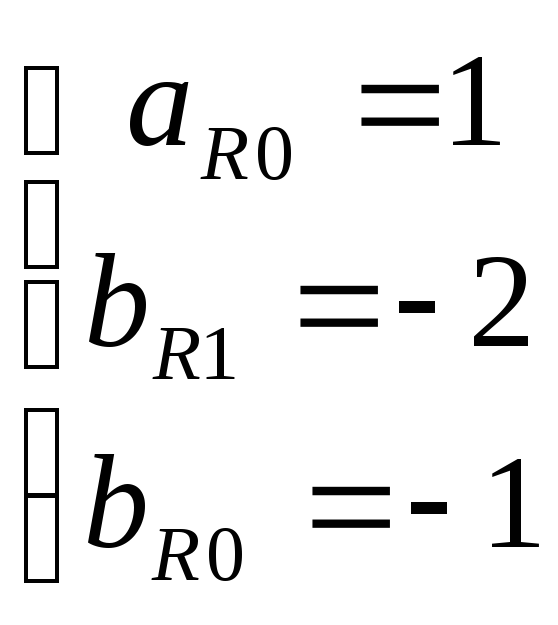
В этом случае ПФ регулятора:
![]()
Регулятор
![]() находится на границе устойчивости, т.к.
имеет корень равный -1.
находится на границе устойчивости, т.к.
имеет корень равный -1.
Проведем компьютерное моделирование замкнутой системы; структурная схема представлена на рисунке 2.
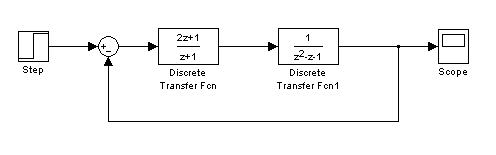
Рис.2. Структурная схема моделируемой системы.
Результаты моделирования представлены на рисунке 3:

Рис.3. Результат моделирования.
Как видно из рисунка 3, процесс действительно затухает за 3 шага. Однако, система имеет большую статическую ошибку – установившееся значение не равно заданному.
-
Дискретный объект третьего порядка
Для обеспечения астатизма
введем в контур дискретный интегратор
с ПФ
![]() .
В результате порядок объекта повышается
на 1, т.е.
.
В результате порядок объекта повышается
на 1, т.е.
![]() ,
а структура регулятора:
,
а структура регулятора:
![]()
![]() имеет вид:
имеет вид:
Система имеет пятый порядок
(
![]() ). Таково же число неизвестных коэффициентов
регулятора. Запишем тождество, с учетом
того, что желаемый полином имеет пять
нулевых корней:
). Таково же число неизвестных коэффициентов
регулятора. Запишем тождество, с учетом
того, что желаемый полином имеет пять
нулевых корней:
![]()
Раскрыв скобки, найдем неизвестные коэффициенты:
![]() -
дискретная передаточная функция
регулятора.
-
дискретная передаточная функция
регулятора.
Проведем компьютерное моделирование. Результат представлен на рисунке 4.
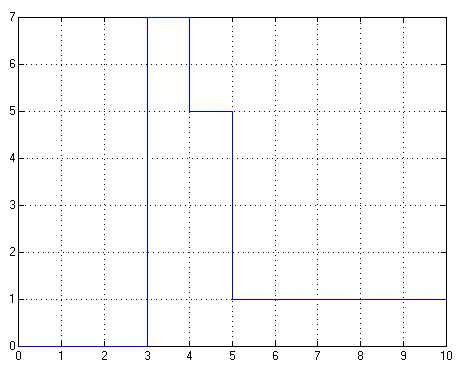
Рис. 4. Результат моделирования.
По рисунку 4 видно, что система имеет нулевую статическую ошибку, а переходные процессы затухают за 5 шагов.
-
Синтез регулятора методом пространства состояний
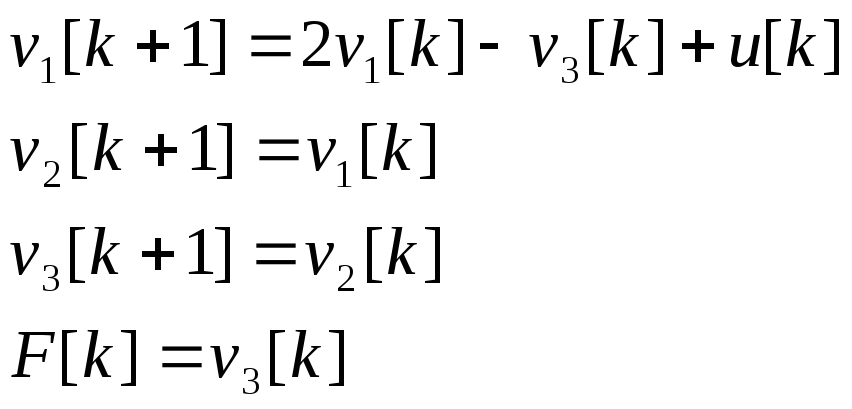
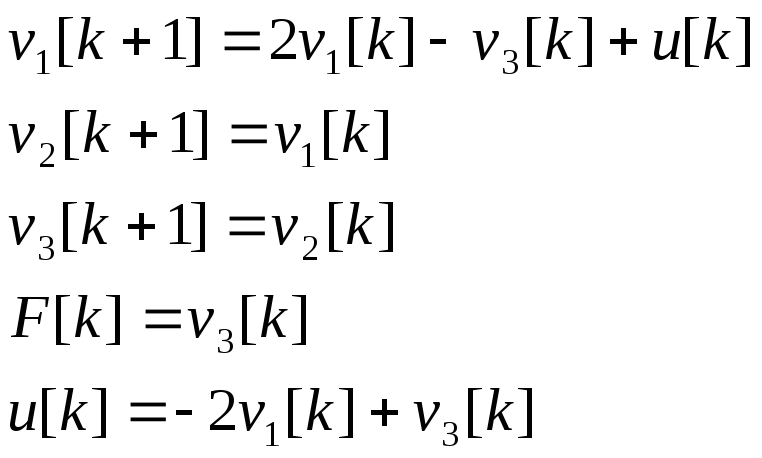
Разностное уравнение объекта должно иметь форму пространства состояний:
![]()
где
![]()
Преобразуем дискретную передаточную функцию объекта в ФПС:
![]()
С помощью MATLAB получим:


![]()
D = 0
Уравнения в ФПС:
Анализ устойчивости
Собственные значения матрицы А:
1.6180
1.0000
-0.618
По собственным значениям матрицы видно, что система неустойчива. Необходим синтез регулятора. Регулятор состояния требует текущую информацию о всех переменных состояния:
![]()
Для синтеза воспользуемся методом размещения собственных значений матрицы (модальное управление). Для этого назначим желаемые собственные значения из условия конечности времени затухания процессов (3 собственных значения).
Для вычисления матрицы регулятора воспользуемся MATLAB:
>> z=[0 0 0]'; % желаемые собственные значия
>> K=acker(A,B,z) % матрица регулятора
K =( 2 0 -1 )
Тогда регулятор примет вид:
![]()
Т.о. регулятор состояния требует «измерения» будущих значений выхода объекта или измерения внутренних состояний объекта.
Проанализируем устойчивость замкнутой системы.
Собственные значения матрицы(А-В*К) - (0 0 0).
Проведем компьютерную имитацию системы, предполагая возможность измерения требуемых переменных состояния.
Структурная схема представлена на рисунке 5:
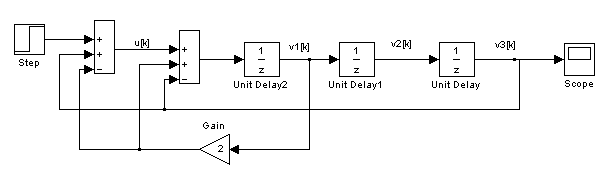
Рис.5. Система с регулятором.
Переходная последовательность на рисунке 6:

Рис. 6. Переходная последовательность.
Как видно из графика на рисунке 6, процесс затухает за три шага, как и было задумано.