

Лабораторная работа 61 / 06
.docФедеральное агентство по образованию Российской Федерации
Санкт-Петербургский государственный электротехнический
университет «ЛЭТИ» имени В.И. Ульянова (Ленина)
Кафедра автоматики и процессов управления
Отчет по лабораторной работе №6
на тему: "Исследование типовых установившихся режимов систем автоматического регулирования (САР). Определение установившихся ошибок систем с обратной связью при степенных и гармонических воздействиях"
по дисциплине «Теория автоматического управления»
Бригада № 1, вариант № 1
Выполнили: Богомолова К.С.
Золотарев А.Р.
Миненков Д.В.
Группа: 4322
Факультет: КТИ
Проверил: Баранов А.В.
Санкт-Петербург
2006
Цель работы: Исследование типовых установившихся режимов систем автоматического регулирования (САР). Определение установившихся ошибок систем с обратной связью при степенных и гармонических воздействиях.
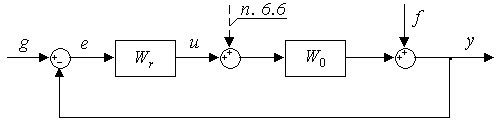
Задача 6.1. Для системы, структурная схема которой приведена на рис. 1 с ПФ:
![]() ,
,
![]() ,
где
,
где
![]() ;
;
![]()
определить
установившуюся ошибку в отдельности:
при ступенчатом воздействии
![]() ;
при линейном воздействии
;
при линейном воздействии
![]() (
(![]() ).
).
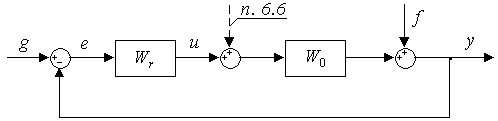
Рис.1
![]()
![]()
![]()
![]()
ПФ разомкнутого контура системы:
![]() ;
;
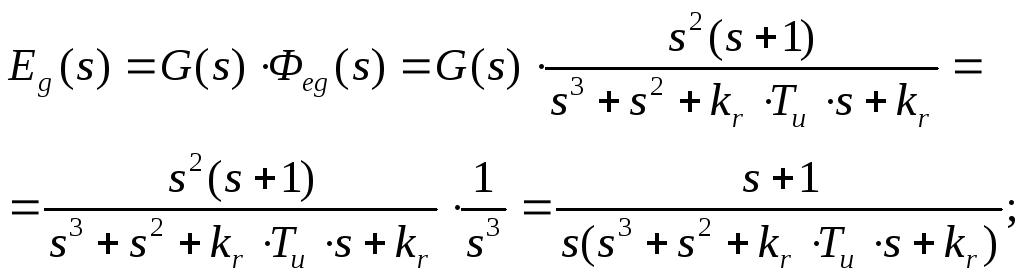
ПФ возмущающего и задающего воздействий в s-области:

Изображение переменной ошибки:

![]()
Так как ПФ Фeg(s) и Фef(s) отличаются только знаком, достаточно рассмотрения одного из каналов.

![]()
![]()
![]()
Ответить на следующие вопросы:
-
Система статическая или астатическая?
Система имеет
порядок астатизма
![]() =0,
так как у ПФ разомкнутого контура нет
полюсов, равных 0; так как установившаяся
реакция ошибки на степенное возмущение
=0,
так как у ПФ разомкнутого контура нет
полюсов, равных 0; так как установившаяся
реакция ошибки на степенное возмущение
![]() равна
равна
![]() ,
то система статическая
,
то система статическая
![]() .
.
-
Какой параметр ПФ
 определяет величину установившейся
ошибки по возмущению?
определяет величину установившейся
ошибки по возмущению?
![]()



Величину
установившейся ошибки по возмущению
определяет параметр
![]() ПФ
ПФ
![]() :
при увеличении
:
при увеличении
![]() знаменатель ПФ ошибки в пределе при
знаменатель ПФ ошибки в пределе при
![]() увеличивается, то есть общая ошибка
уменьшается, и наоборот.
увеличивается, то есть общая ошибка
уменьшается, и наоборот.
-
В чём заключается противоречивость требований к малости установившейся и переходной составляющих ошибки системы?
Противоречивость требований к малости установившейся и переходной составляющих ошибки системы заключается в том, что чем больше порядок астатизма числа степени воздействия, тем меньше установившаяся ошибка, но при этом воздействие имеет большую степень, а значит должно порождать большую ошибку.
-
Какое минимальное значение установившейся ошибки по возмущению заданного вида можно обеспечить в этой системе? Проверить экспериментально, подтвердив результаты графиками.
![]()
Минимальное
значение установившейся ошибки по
возмущению заданного вида равно нулю,
при
![]() .
.
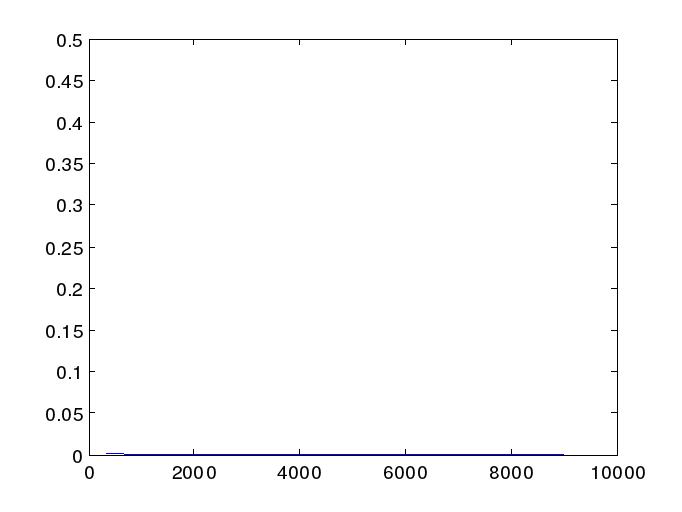
Рис. 2
зависимость установившейся ошибки по
возмущению от коэффициента
![]() .
.
Задача 6.2. Для системы со структурной схемой из задачи 6.1 принять:
![]() ,
,
![]() ,
,
что соответствует
ПИ-закону регулирования. Определить
параметры настройки регулятора
(коэффициент передачи
![]() и постоянную времени изодрома
и постоянную времени изодрома
![]() ),
обеспечивающие
устойчивость замкнутой системы. Построить
зависимость установившейся ошибки при
параболическом воздействии
),
обеспечивающие
устойчивость замкнутой системы. Построить
зависимость установившейся ошибки при
параболическом воздействии
![]() от коэффициента
от коэффициента
![]() .
.
ПФ замкнутой системы:
![]()

1) необходимое
условие устойчивости: все коэффициенты
![]() многочлена
многочлена
![]() должны
быть больше нуля, следовательно
должны
быть больше нуля, следовательно
![]() ,
,
![]()
2) устойчивость
замкнутой системы по критерию Гурвица
для системы третьего порядка обеспечивается
при удовлетворении неравенства
![]() , где
, где
![]() -коэффициенты
при членах n-ой степени многочлена
-коэффициенты
при членах n-ой степени многочлена
![]() ;
;
![]()
![]()
![]()
![]()
![]() - искомые параметры
настройки регулятора
- искомые параметры
настройки регулятора
![]()
![]()


Таким образом,
установившаяся ошибка уменьшается с
увеличением
![]() ;
;
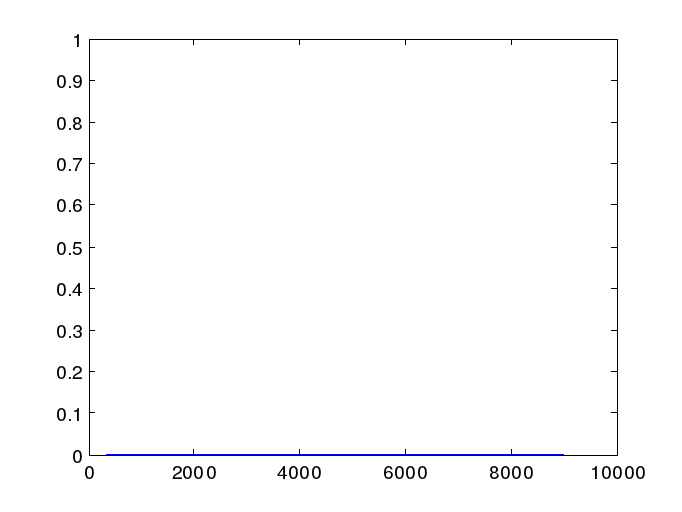
рис. 3
зависимость установившейся ошибки при
параболическом воздействии от
![]()
Ответить на следующие вопросы:
-
Какое минимальное значение установившейся ошибки при заданном воздействии можно обеспечить в этой системе?
![]()
Минимальное
значение установившейся ошибки по
возмущению заданного вида равно нулю,
при
![]() (рис
3).
(рис
3).
-
Как изменяется характер переходного процесса в системе на воздействие
 при возрастании коэффициента
при возрастании коэффициента
 ?
?
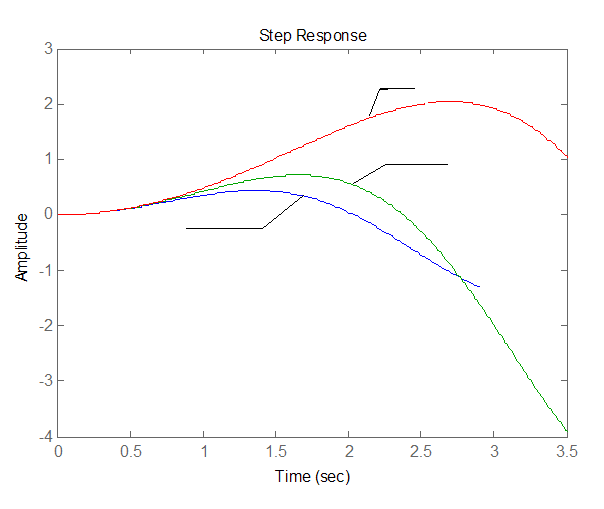
Рис. 4
График зависимости ПХ от коэффициента
![]()
При возрастании
коэффициента
![]() колебательность системы увеличивается.
колебательность системы увеличивается.
-
Каким будет установившийся режим в системе при выборе
 c? Дать пояснения.
c? Дать пояснения.
![]()
По критерию Гурвица
для системы третьего порядка при
![]() где
где
![]() -коэффициенты
при членах n-ой степени многочлена
-коэффициенты
при членах n-ой степени многочлена
![]() ,
система находится на границе устойчивости.
,
система находится на границе устойчивости.
![]()
![]()
![]()
![]()
Установившийся
режим в системе при выборе
![]() будет находиться на границе устойчивости.
Тоесть на выходе будут незатухающие
колебания.
будет находиться на границе устойчивости.
Тоесть на выходе будут незатухающие
колебания.
![]() ,
,
![]() ,
,
![]() =4
=4
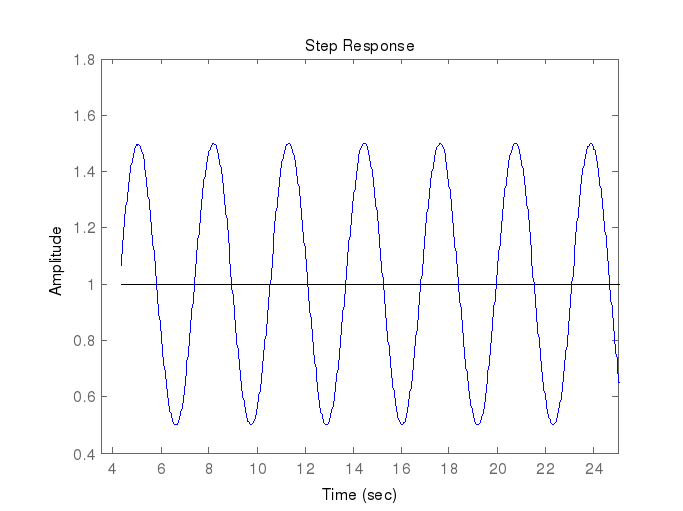
Рис. 5
переходная характеристика системы
![]() ,
,
![]() =4
=4
Задача 6.3
Для той же системы с ПИ-регулятором (см.
ПФ
![]() в задаче 6.2) и ПФ объекта:
в задаче 6.2) и ПФ объекта:
![]() ,
где
,
где
![]()
![]()
принять параметры
настройки
![]() ,
,
![]() c. Определить диапазоны частот
c. Определить диапазоны частот
![]() и
и
![]() задающего гармонического воздействия
задающего гармонического воздействия
![]() ,
для которых относительная амплитуда
установившейся ошибки
,
для которых относительная амплитуда
установившейся ошибки
![]() и
и
![]() (рекомендуется использовать график
логарифмической амплитудно-частотной
характеристики (ЛАЧХ)). Определить
абсолютные значения амплитуды ошибки
(рекомендуется использовать график
логарифмической амплитудно-частотной
характеристики (ЛАЧХ)). Определить
абсолютные значения амплитуды ошибки
![]() для двух значений частоты
для двух значений частоты
![]() воздействия в каждом из диапазонов,
приняв
воздействия в каждом из диапазонов,
приняв
![]() .
Провести вычислительный эксперимент,
подав на вход системы гармонический
сигнал соответствующей частоты.
.
Провести вычислительный эксперимент,
подав на вход системы гармонический
сигнал соответствующей частоты.
![]()
![]()
![]() ;
;
![]()
![]()


Рис. 6
График ЛЧХ замкнутой системы по ошибке
![]() .
.
![]() (ЛАЧХ
(ЛАЧХ![]() )
)
![]() (ЛАЧХ
(ЛАЧХ![]() )
)
Абсолютные значения
амплитуды ошибки
![]() при
при
![]() =1;
=1;
![]()
Для диапазона
![]()
![]()
Для диапазона
![]()
![]()
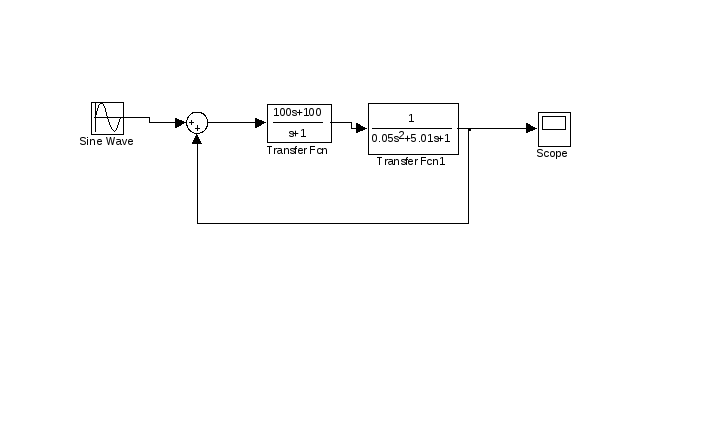
Рис. 7 Структурная схема прохождения гармонического сигнала через контур
(Matlab/Simulink).

Рис. 8 График синусоиды с частотой 0,01 до прохождения через контур.

Рис. 9 График синусоиды с частотой 0,01 после прохождения через контур.

Рис. 10 График синусоиды с частотой 100 до прохождения через контур.

Рис. 11 График синусоиды с частотой 100 после прохождения через контур.
Как видно из
графиков, гармонический сигнал с частотой
0,01 проходит через систему без искажений
(ошибка![]() ),
а гармонический сигнал с частотой 100
практически гасится (ошибка
),
а гармонический сигнал с частотой 100
практически гасится (ошибка![]() ).
).
Ответить на следующие вопросы:
-
Какой вид имеет АЧХ (ЛАЧХ) замкнутой системы по ошибке?
График ЛАЧХ замкнутой системы по ошибке приведён на рисунке 12.
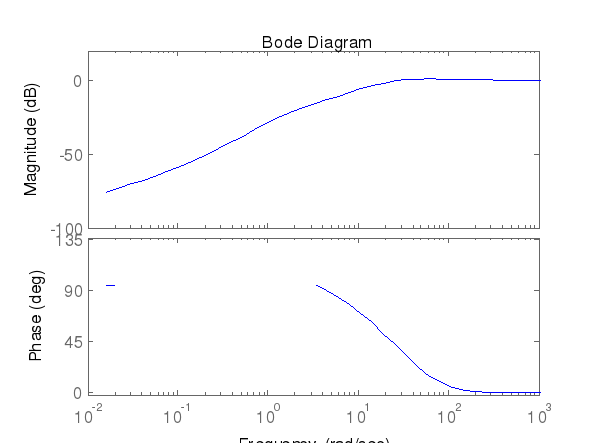
Рис. 12 График ЛАЧХ замкнутой системы по ошибке.
-
Как изменятся рассчитанные диапазоны частот
 и
и
 при увеличении (уменьшении)
при увеличении (уменьшении)
 в 10 раз?
в 10 раз?
При
![]()
![]()
![]()
![]()


Рис. 13 График ЛЧХ
замкнутой системы по ошибке
![]() при
при
![]() .
.
![]() (тоесть ЛАЧХ
(тоесть ЛАЧХ![]() )
)
![]() (тоесть
ЛАЧХ
(тоесть
ЛАЧХ![]() )
)
При![]()
![]()
![]()
![]()

График ЛЧХ замкнутой
системы по ошибке
![]() при
при
![]() приведён
на рисунке 14.
приведён
на рисунке 14.
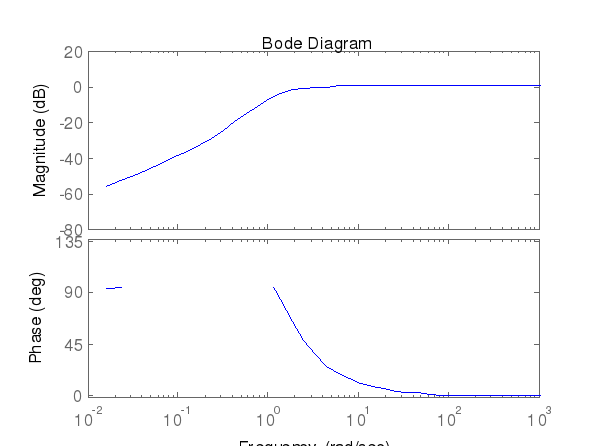
Рис. 14 График ЛЧХ
замкнутой системы по ошибке
![]() при
при
![]() .
.
![]() (тоесть ЛАЧХ
(тоесть ЛАЧХ![]() )
)
![]() (тоесть
ЛАЧХ
(тоесть
ЛАЧХ![]() )
)
Вывод: при увеличении
![]() диапазон частот
диапазон частот
![]() увеличивается,
а диапазон частот
увеличивается,
а диапазон частот
![]() уменьшается;
при уменьшении
уменьшается;
при уменьшении
![]() диапазон частот
диапазон частот
![]() уменьшается,
а диапазон частот
уменьшается,
а диапазон частот
![]() увеличивается.
увеличивается.
Задача 6.4. Для системы из задачи 6.3 определить установившуюся ошибку при экспоненциальном воздействии
![]() , где
, где
![]()
Объяснить результат.
![]()
![]()
![]()
![]()

![]()
![]()
Воздействие
![]() очень
быстро затухает, в установившемся режиме
влияние воздействия стремится к нулю.
очень
быстро затухает, в установившемся режиме
влияние воздействия стремится к нулю.
Ответить на следующие вопросы:
-
Какой характер имеет реакция системы на выходе на такое воздействие?
Реакция системы на быстро затухающее воздействие тоже является затухающей.
-
Какой будет величина установившейся ошибки, если регулятор реализует П-закон, т. е.
 ?
?
![]()
![]()
![]()
![]()

![]()
![]() - величина
установившейся ошибки равна 0
- величина
установившейся ошибки равна 0
Задача 6.5. Чему равна установившаяся ошибка в системе из задачи 6.3 при возмущающем воздействии вида
![]() ,
где
,
где
![]()
при использовании
П- и ПИ-регулятора? Численное значение
коэффициента
![]() принять равным 100. Объяснить результат.
принять равным 100. Объяснить результат.
![]()
![]()
1) При использовании П-регулятора:
![]()
![]()

![]()
![]()
ПФ воздействия имеет один нулевой полюс, что позволяет при использовании П-регулятора иметь ненулевую установившуюся ошибку.
2) При использовании Пи-регулятора:
![]()
![]()

![]()
![]()
Возмущающее
воздействие
![]() имеет постоянную составляющую, поэтому
воздействие не затухающее, а стремится
к постоянному.
имеет постоянную составляющую, поэтому
воздействие не затухающее, а стремится
к постоянному.
Задача 6.6. Определить установившуюся ошибку системы в условиях задачи 6.5, если возмущающее воздействие того же типа действует на входе объекта.
![]()
![]()
![]()
1) Для П-регулятора:
![]()
![]()

![]()
![]()
2) Для ПИ-регулятора:
![]()
![]()

![]()
![]()
Вывод: установившаяся ошибка системы не зависит от места приложения возмущающего воздействия.