

Лабораторная работа №5 / лаба по Тау5
.docСанкт-Петербургский Государственный Электротехнический Университет.
Отчет к Лабораторной работе №5 по ТАУ.
«Изучение методов построения фазовых портретов нелинейных динамических систем»
Выполнили:
гр.1321
Волох К.А.
Петренко В.
Санкт-Петербург 2004г.
Цель работы: Построение фазовых характеристик динамических систем.
Пример1:
l – длина маятника.
Маятник, отклоненный от нижнего положения равновесия на угол Θ.
ДУ:
![]()
Точки равновесия: 0, ±π, ±2π.
Линеаризованное уравнение для малых отклонений от положения равновесия дифференциального уравнения имеют вид:
Л.У:
![]() - четные
- четные
![]() - нечетные
- нечетные
Теперь характеристические полиномы линеаризованных уравнений:
s2+![]() ;
s2-
;
s2-![]() имеют корни s1,2=±j√(g/l);
s1,2=±√(g/l);
имеют корни s1,2=±j√(g/l);
s1,2=±√(g/l);
В окрестности нижних положений равновесия («четных») фазовые портреты типа центр, а в окрестности верхних («нечетных») – седло.
Для больших отклонений от положения равновесия фазовой траектории будем строить численным методом с помощью программы MatLab Simulink.
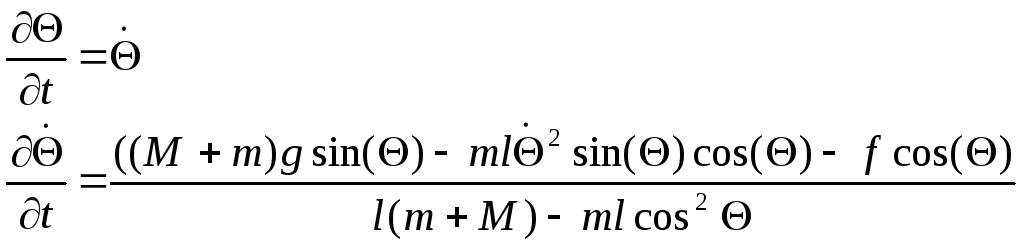
Уравнение в форме Коши:
![]()
![]()
Поделим первое уравнение на второе.
![]()
Разрешим это уравнение, с помощью интегрирования переменных
![]()
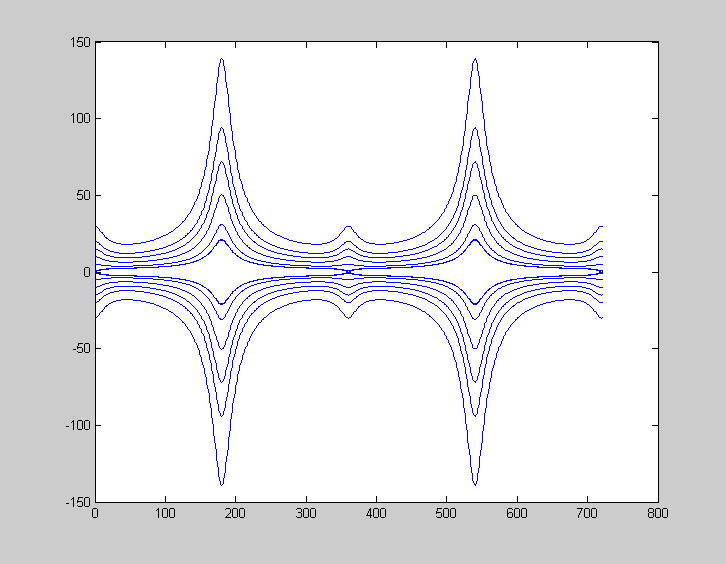
При начальном отклонении маятника на 1 рад, получим следующую зависимость.
Начальное угловое ускорение равно 0.1 рад/с
![]() =
=![]()
phase1.m
//------------------------
function phase()
mas(722)=0;
for i=1:361*2 // i - градусы
n=i*(2*pi/360);
mas(i)=sqrt(19.62*cos(n)-0.01-19.62*0.54);
end
plot(abs(mas))
hold
plot(-abs(mas))
//------------------------
>>phase1

Пример2: Маятник на каретке.
Исходные уравнения системы:
![]()
![]()
В форме Коши уравнение примет вид:
Поделим первое уравнение на второе.
![]()
Для
больших углов отклонения
![]() интегрирование полученного уравнения
затруднено, поэтому проведем относительное
интегрирование.
интегрирование полученного уравнения
затруднено, поэтому проведем относительное
интегрирование.

![]()

Проекция
фазовой траектории на плоскость (![]() ,
,![]() )
)
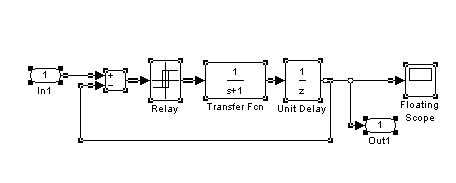
Пример3: Релейная система управления.
Фазовый
портрет на плоскость(![]() ,
,![]() )
)
![]() =
=![]()
x y
![]()
Модель представлена в форме структурной схемы. Запишем модель в форме 2-х уравнений 1-го порядка.
x=-z
элемент сравнения. Выберем следующие
элементы состояния(x,![]() )
)
y=F(x)
Получим:
![]()
Найдем положение равновесия:
Нет изолированных особых точек, поэтому не можем воспользоваться малой линеаризацией для малых отклонений.
Учтем, что F(x) – кусочно-постоянная функция.

Разделим переменные.
![]()
![]()
3 уравнения фазовых траекторий по участкам:
1.
x>b; F(x)=+C:
![]()
2.
|x|<=b; F(x)=0:
![]()
3.
x<-b; F(x)=-C
![]()

Пример4: Модель Рёсслера «Спиральный хаос»
![]()
![]()
![]()
Проекция на плоскость (x,y)
Поделим второе уравнение на второе:
![]() ;
;
Поделим первое на второе:
![]() ;
;
![]()
![]() ;
;
Интегрирование дает следующие результаты:
xz+0.32yz=0.3xy+2.25x2+1.44yx+2.25y2-(1/3)x3-0.16yx2-0.5xy2;
![]() =Z
=Z
![]()
Интегрирование дает следующую зависимость:
![]()
![]()
