Лабораторная работа 5 / Лабораторная Работа5
.docСанкт-Петербургский Государственный Электротехнический Университет «ЛЭТИ»
Кафедра АПУ
Отчет
по лабораторной работе №5
по дисциплине «Теория автоматического управления»
«Фазовые портреты нелинейных систем»
Выполнили:
студенты гр. 4322
факультет КТИ
Миненков Д.В.
Золотарев А.Р.
Проверил:
Проф. Имаев Д. Х..
СПб 2007 г.
Цель работы: изучение методов синтеза дискретных систем управления:
Пример 1.Математический маятник
Дифференциальное уравнение маятника:
![]()
![]()
![]()
Пусть
![]()
![]()
Точки равновесия (особые точки):
![]()
![]()
![]()
Т ипы
особых точек определяются корнями
характеристических полиномов
линеаризованных дифференциальных
уравнений.
ипы
особых точек определяются корнями
характеристических полиномов
линеаризованных дифференциальных
уравнений.
Фазовый портрет, т.е. совокупность фазовых траекторий, можно получить разными способами:
-
аналитически
-
численным способом – компьютерным моделированием.
Рассмотрим оба эти способа.
Рис.1. Маятник
1)
![]()
Произведем вычисления и построение с помощью следующего M-кода:
dt0=0;
t0=pi/2;
theta=-2*pi:0.1:2*pi;
dtheta=sqrt(2*cos(theta)+dt0^2-2*cos(t0));
plot(theta,dtheta)
hold on
plot(theta,-dtheta)
Полученный график приведен на рисунке 2:
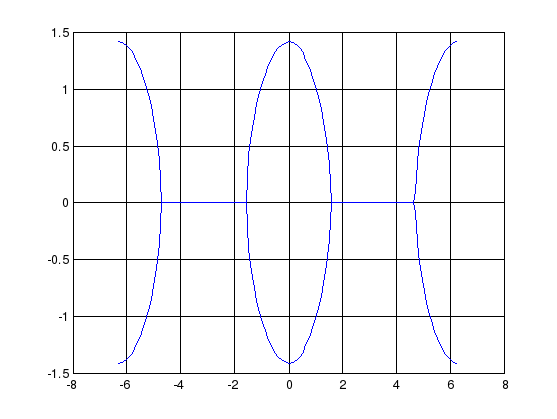
Рис.2. Фазовый портрет.
-
Получим теперь фазовый портрет с помощью Simulink.
![]()
Моделируемая схема представлена на рисунке 3:
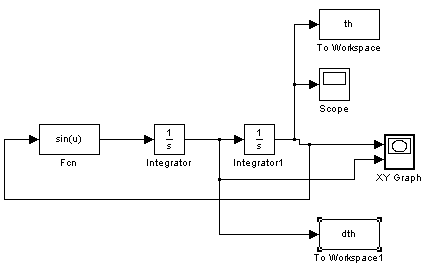
Рис.3 Моделируемая система.
Фазовый портрет, полученный в результате моделирования – на рисунке 4:

Рис.4. Фазовый портрет моделируемой системы.
Пример 2. Релейная система управления
Построим модель системы с помощью MATLAB Simulink:

Рис.5. Исследуемая модель.
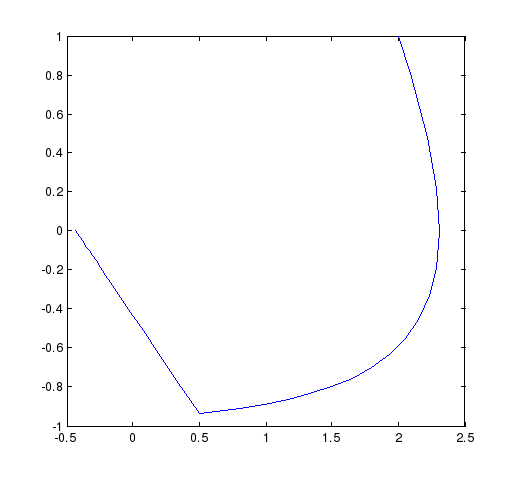
Рис. 6. График зависимости z’ от z
В контуре имеется интегратор, вход которого в состоянии равновесия равен нулю .
z’=0 ; y=0, |x|<1 и |z|<1