

8.1 Дельта-модуляция
При рассмотрении принципов ИКМ и ДИКМ период дискретизации выбран в соответствии с теоремой Котельникова: TA=1/2FB. Некоторые преимущества, которые дает применение ДИКМ, основаны на том, что соседние отсчеты дискретизированного сигнала с большой вероятностью мало отличаются друг от друга. Последнее и дает возможность уменьшить разрядность кодовых групп, отображающих передаваемые разности отсчетов. Следовательно, если взять период дискретизации TД<<1/2*Fв, то различие между соседними отсчетами аналогового сигнала будет еще меньше, а применительно к ДИКМ меньше и разрядность кода. Поэтому при достаточно малом периоде дискретизации разность между соседними отсчетами может быть сделана достаточно малой, а именно такой, когда за каждый период дискретиза Δ U<Δ, где Д — выбранный шаг квантования, либо +1, если Δ U>Δ. Таким o6paзом при выбранном приращении передаются сведения только о его знаке и для этого достаточно передавать один двоичный символ в каждый момент отсчета. Такой способ формирования цифрового сигнала называется классической дельта-модуляцией (ДМ) в отличие от других, более поздних ее разновидностей.
Если взять частоту квантования очень большой (150-160 кГц), то приращение сигнала предыдущего в последующий (∆S) будет очень мало, следовательно можно передать только приращение (либо падение, либо прирост).
Если сигнал не меняется, то на выходе будет ноль. Если меняется, то – импульс, который можно закодировать любым кодом.
Стандартными ИКМ системами являются субсистема ИКМ-15, первичной типовой – ИКМ-30(2), вторичной – ИКМ-120(8), третичной – ИКМ-480(32) и четверичная – ИКМ-1920(128).
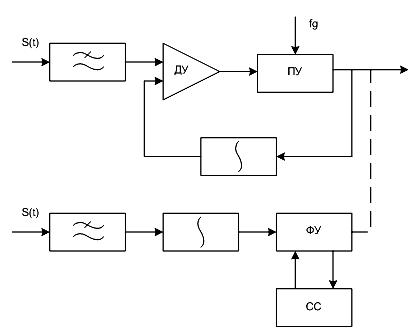
Рисунок 3.1

Рисунок 33.2

Рисунок 33.3
8.2 Аппаратура первичной и субпервичной ступеней
Скорость передачи группового и ИКМ сигнала определяется тактовой частотой системы:
fT = mnfД,
где m –разрядность кодовой группы;
n – число каналов в системе, включая канальные интервалы для передачи СУВ, СС и других служебных сигналов;
fД – частота дискретизации канала ТЧ.
Так, для системы передачи ИКМ-30, где используется 8-разрядный код, 32 канальных интервала, fД = 8 кГц, fT = 8*32*8=2048 кГц. Необходимая скорость и последовательность работы передающих устройств системы передачи обеспечиваются задающим генератором ЗГ и устройствами ГОпер.

Рисунок 34 - Принцип построения систем передачи с ИКМ
Принцип построения систем передачи с ИКМ показан на рисунке 34.
Сообщения u1(t), u2(t), …., un(t) от 1,2, …, n абонентов через ФНЧ поступают на канальные амплитудно-импульсные модуляторы М, функцию которых выполняют электронные ключи. С помощью модуляторов осуществляется дискретизация передаваемых сигналов во времени. Сигналы с выходов модуляторов объединяются в групповой АИМ сигнал (Гр. АИМпер). Управляют работой модуляторов канальные импульсы КИ1 – КИn, поступающие от генераторного оборудования передачи ГОпер. Указанные импульсы подаются на модуляторы каналов поочередно (первый, второй и т.д.), что и обеспечивает правильное формирование группового АИМ сигнала. Длительность каждого КИ составляет примерно 125/2n мкс, что и определяет длительность одного отсчета АИМ импульса канала; период следования КИ 125 мкс. Групповой АИМ сигнал поступает на кодирующее устройство – кодер, который одновременно осуществляет операции квантования по уровню и кодирования.
Сигналы управления и взаимодействия (СУВ), передаваемые по телефонным каналам для управления приборами АТС, поступают в передатчик Пер. СУВ, где они дискретизируются импульсными последовательностями , следующими от ГОпер, и объединяются. В результате формируется групповой сигнал передачи Гр. СУВ.
В устройстве объединения УО кодовые группы каналов с выхода кодера, кодированные сигналы СУВ и кодовая группа синхросигнала от передатчика синхросигнала Пер. СС объединяются, образуя циклы и сверхциклы. Соответствующими управляющими импульсами от ГОпер в УО обеспечивается правильный порядок следования циклов в сверхцикле и кодовых групп в цикле передачи. Поясним построение временной диаграммы цикла и сверхцикла, показанных на рисунке 35, более подробно.

Рисунок 35 – Временная диаграмма цикла и сверхцикла
Циклы, Ц1, Ц2,…,ЦS , каждый длительностью 125 мкс, объединяются в сверхциклы, следующие друг за другом. Каждый цикл состоит из канальных интервалов КИ1, КИ2,…, КИn, куда входят идопол7нительные канальные интервалы, необходимые для передачи синхросигнала СС цикловой синхронизации, каналов СУВ и других вспомогательных сигналов. На рисунке 35 эти КИ выделены соответствующими обозначениями.
Каждый КИ представляет собой m-разрядную кодовую группу, в разрядах Р1,Р2,…, Рm которой передается закодированная информация соответствующего канала, а в дополнительных КИ – кодовые группы синхросигнала и СУВ. Обычно за один цикл передаются СУВ одного или двух каналов. Таким образом, для передачи СУВ всех n каналов потребуется соответственно n или n/2 циклов, объединенных в сверхцикл. Такое объединение циклов в сверхцикл необходимо для организации нужного числа каналов передачи СУВ и правильного распределения этих сигналов на приеме. В первом цикле сверхцикла передаются синхросигнал сверхцикловой синхронизации, а СУВ не передаются. Таким образом, число циклов в сверхцикле на один больше, чем требуется для передачи СУВ всех каналов.