

38,37) Оптимизация контура скорости на симметричный оптимум.
Структурная
схема контура скорости представлена
на рисунке 5.26.
СО:
 ;
;
Рисунок
5.27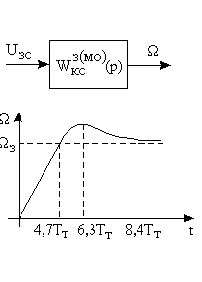
![]() .
.
Получили ПИ-регулятор, у которого kрс(со) = kрс(мо); Тиз = 4Тт.
![]() Такой
переходный процесс будет только пока
все звенья контура линейные (пока
регулятор скорости не вышел на ограничение)
и это возможно при подаче лишь малых
сигналов задания.
Такой
переходный процесс будет только пока
все звенья контура линейные (пока
регулятор скорости не вышел на ограничение)
и это возможно при подаче лишь малых
сигналов задания.
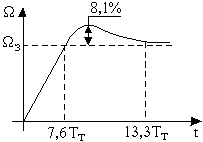
Такой переходный процесс в системах ЭП нежелателен, поэтому для уменьшения перерегулирования на входе включают фильтр.
 ,
,
где Тс(со) = 4Тт – эквивалентная постоянная времени оптимизированного на СО контура скорости.Тс(мо) = 2Тт;
Тс(со) = 4Тт.
Контур скорости, оптимизированный на СО с фильтром на входе имеет быстродействие вдвое меньшее, чем контур, оптимизированный на МО.
Данный
контур скорости является по заданию
астатическим второго порядка (только
при наличии 2-й производной во входном
сигнале появляется ошибка). Астатизм
достигнут за счет уменьшения быстродействия.
При нелинейно изменяющемся входном сигнале задания на скорость на выходе регулятора будет сигнал, полученный в результате интегрирования и запоминания интегральной части регулятора. При появлении скоростной ошибки сигнал на выходе регулятора скорости будет изменяться, что будет приводить к изменению сигнала задания на ток и соответственно тока, что свидетельствует о переходных процессах в приводе. Скоростная ошибка в этой системе по заданию возможна только в начале и в конце отработки линейно изменяющегося сигнала задания.
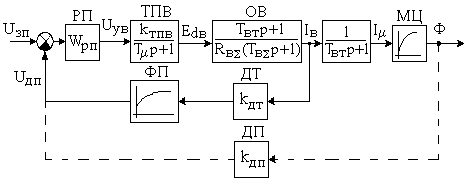
39) Стабилизация магнитного потока дпт с нв.
Для непосредственного измерения потока двигателя необходимы либо датчики Холла, либо специальные обмотки, которые закладываются в пазы статора. Проще измерить поток косвенно по сигналу датчика потока возбуждения.
а)
б)
Рисунок
5.28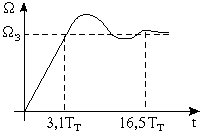
![]() .
.
Это условие необходимо выполнить, чтобы настройка контура оставалась той же. Для выполнения условия
 функциональный
преобразователь ФП в определенном
масштабе должен воспроизводить кривую
намагничивания двигателя.
функциональный
преобразователь ФП в определенном
масштабе должен воспроизводить кривую
намагничивания двигателя.
![]() .
.
Реализация ФП осуществляется с помощью операционного усилителя с нелинейным элементом в цепи обратной связи (см. рисунок 5.61). Нелинейный элемент – это переменное сопротивление, которое изменяется с изменением выходного сигнала преобразователя.
Реальная реализация осуществляется методом кусочно-линейной аппроксимации (рисунок 5.62).
К0
=
![]() ;
R0C0
= Tвт
(Фмин);
;
R0C0
= Tвт
(Фмин);
K1
=
![]() ;
;
K2
=
![]() .
.
При изменении рабочей точки на КНМ величина постоянного времени функционального преобразователя, равная Твт, будет меняться автоматически.
Для 1-го участка: R0C0 = Твт (Фмин);
для 2-го участка: (R0//R1)C0 = Твт1;
для3-го участка: (R0//R1//R2)C0 = Твт2.
Если функционального преобразователя в канале обратной связи нет, то оптимальная настройка контура потока будет только в одной расчетной точке кривой намагничивания. Такое допускается в системах АЭП с небольшим ослаблением потока (на 20-30%).