

36). Работа дпт с нв в двигательном режиме.
Типовой узел, реализующий управление в функции тока представлен на рисунке 2.11, где приняты обозначения: Rп = R2+R1; РУП – реле управления полем; Rвд – введенное сопротивление, от которого
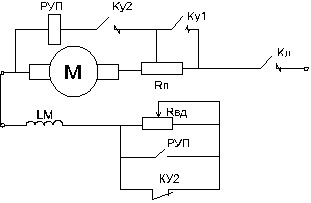
зависит скорость во 2-ой зоне.
Реально Iотпруп = Iсрруп, Тв = LB/RB.
Тв при уменьшении потока – Тв = LB/(RB+Rвд). Тв при увеличении потока – Тв = LB/(RB), то есть ослабление потока идет с Рисунок 2.11 большей интенсивностью, чем увеличение (см. рисунок 2.12).

Рисунок 2.12
При уменьшении поля поток ослабляется в большей степени, чем увеличивается , поэтому ток якоря растет. При увеличении поля ток якоря растет.
Работа схемы: данный узел начинает работать после включения контактора КУ2, т.е. при выходе двигателя на ЕХ. От броска тока срабатывает РУП и вновь шунтирует Rвд (до этого оно шунтировалось контактором КУ2). Разгон продолжается на ЕХ до момента времени, когда ток якоря станет равным току отпускания РУП. Реле РУП выключается, в цепь обмотки возбуждения вводится Rвд, происходит ослабление поля, ток якоря увеличивается. При токе якоря равным току срабатывания РУП оно (РУП) зашунтирует Rвд, поле электродвигателя начнет увеличиваться, но значительно медленнее, ток якоря начнет уменьшаться.Процесс повторится несколько десятков раз, пока поле выйдет на Фу, которое соответствует определенному положению движка Rвд.
Достоинства: простота реализации метода.
Недостатки:
- для каждого электродвигателя нужен свой электрический аппарат (РУП);
- время пуска является функцией Мс и момента инерции.
37). Оптимизация контура скорости на модульный оптимум.
Объект регулирования содержит апериодическое звено с малой постоянной времени и интегрирующее звено.
Возможны два варианта оптимизации:
- на МО (контур скорости однократноинтегрирующий);
- на СО (контур скорости двухкратноинтегрирующий).
Кратность интегрирования определяется количеством интегральных звеньев во внешнем контуре.
Однократноинтегрирующая система аэп схема 5.26
![]() ;
;
![]() .
.
С этим П-регулятором система астатична по заданию и статична по возмущению. В целом система статическая.

где Тс = 2Тт – эквивалентная постоянная времени оптимизированного на МО контура скорости.
![]() .
.
УР:
![]() .
.
График переходного процесса контура скорости представлен на рисунке 5.27. Такой характер переходного процесса будет в том случае, если все звенья системы являются линейными (не выходят на ограничение регулятора скорости). С данным регулятором контур скорости является астатическим первого порядка по заданию.
При подаче линейного сигнала задания появляется ошибка по скорости, т.е. система является статической по заданию. Порядок астатизма равен номеру производной во входном сигнале, при котором контур становится статическим, т.е. появляется ошибка по скорости.По возмущению контур скорости является статическим.
Двукратноинтегрирующая система аэп
Структурная схема контура скорости представлена на рисунке 5.26.
Рисунок 5.26
СО:
 ;
;
 .
.
Получили ПИ-регулятор, у которого kрс(со) = kрс(мо); Тиз = 4Тт.
![]() .
.
