

4.2 Критерий устойчивости Гурвица

где
![]() - характеристический полином разомкнутой
системы
- характеристический полином разомкнутой
системы

где
![]() - характеристический полином замкнутой
системы.
- характеристический полином замкнутой
системы.
Правило составления матрицы Гурвица
По главной диагонали вписываются
коэффициенты в порядке убывания, начиная
с
![]() и заканчивая
и заканчивая
![]() .
Справа главной диагонали записываются
коэффициенты с возрастающими индексами,
слева – с убывающими. если индекс больше
n, либо меньше 0, то коэффициенты матрицы
заменяются нулями.
.
Справа главной диагонали записываются
коэффициенты с возрастающими индексами,
слева – с убывающими. если индекс больше
n, либо меньше 0, то коэффициенты матрицы
заменяются нулями.

Отчёркивая соответствующее количество строк или столбцов, вычислим определитель матрицы Гурвица.
Для устойчивости системы по
Гурвицу необходимо и достаточно, чтобы
при положительном коэффициенте
![]() все определители матрицы Гурвица были
положительны
все определители матрицы Гурвица были
положительны
![]() .
.
Если
![]() ,
то система находится на границе
устойчивости.
,
то система находится на границе
устойчивости.
В силу специфики матрицы
Гурвица (последняя строка) содержит
один не нулевой элемент:
![]()
Из условия
![]() можно найти критический коэффициент
усиления
можно найти критический коэффициент
усиления
![]() .
Для устойчивости системы
.
Для устойчивости системы
![]() .
.
Покажем, что необходимым, но недостаточным условием устойчивости является положительность всех коэффициентов характеристического полинома.
1.
![]()
для характеристического полинома 1-ого порядка положительность коэффициентов является необходимым и достаточным условием устойчивости.
2.
![]()

3.
![]()

4.2.1 Методика определения устойчивости по критерию Гурвица
1. Найдём передаточную функцию разомкнутой цепи
.
2. Найдём передаточную функцию замкнутой цепи
 .
.
3. Найдём характеристический полином
![]()
4. Составим матрицу Гурвица.
5. Убедиться, что при
![]()
4.2.2 Методика определения критического коэффициента усиления
Пункты 1 - 4 повторить
5. Найти критический коэффициент усиления из условия
4.3 Критерий Михайлова
В 1938г. Отечественный учёный А.В. Михайлов впервые предложил использовать частотные методы для анализа устойчивости систем.
Пусть задана замкнутая система, структурная схема которой имеет следующий вид:
 ,
,
где .
Решив это уравнение, найдём
корни
![]() ,
тогда характеристический полином можно
записать в виде:
,
тогда характеристический полином можно
записать в виде:
![]() .
.
Заменяя
![]() ,
получим характеристический полином
Михайлова:
,
получим характеристический полином
Михайлова:
![]() .
.
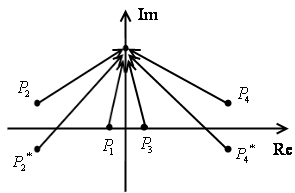
Каждый сомножитель
![]() представляет собой вектор, начало
которого находится в точке корня
представляет собой вектор, начало
которого находится в точке корня
![]() ,
а конец - на мнимой оси.
,
а конец - на мнимой оси.
 .
.
Рассмотрим частные случаи:
1. Пусть все корни лежат в левой полуплоскости комплексной плоскости, то есть система устойчива.
При изменении частоты от
![]() до
до
![]() каждый вектор повернётся на угол
каждый вектор повернётся на угол
![]() ,
тогда
,
тогда
![]() ,
,
![]() .
.
2. Пусть
![]() корней находиться в правой полуплоскости,
каждый из корней повернётся на угол
корней находиться в правой полуплоскости,
каждый из корней повернётся на угол
![]() ,
тогда
,
тогда
![]() ,
,
.
Первое определения устойчивости.
Для устойчивости системы по Михайлову
необходимо и достаточно, чтобы при
изменении частоты от
до
![]() приращение аргумента вектора
было равно
приращение аргумента вектора
было равно
![]() .
Для неустойчивости системы приращение
аргумента
будет равно
.
Для неустойчивости системы приращение
аргумента
будет равно
![]() .
.
Рассмотрим другие формулировки критерия устойчивости по Михайлову. Для этого характеристический полином запишем в виде:
![]() ,
,
где
![]()
![]()
Анализ реальной и мнимой части характеристического полинома Михайлова показывает, что реальная часть является чётной функцией частоты, а мнимая – нечётной функцией. Из этого следует, что годограф Михайлова симметричен относительно реальной оси.
Второе определение устойчивости.
Для устойчивости системы по Михайлову
необходимо и достаточно, чтобы
при изменении частоты от
до
,
то приращение аргумента вектора
было равно
![]() ,
,
![]()
Для неустойчивой системы
![]() ,
.
,
.
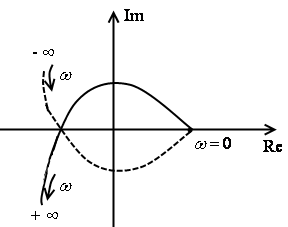
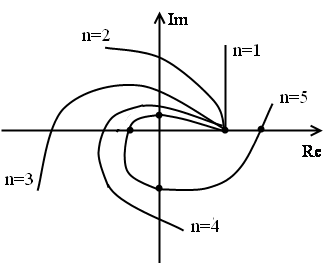
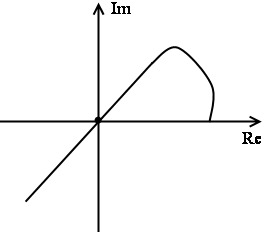
Примеры годографов устойчивых систем
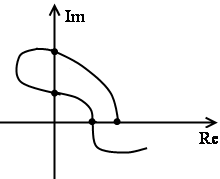
Пример годографа неустойчивой системы
Третье определение устойчивости. Для устойчивости системы по Михайлову необходимо и достаточно, чтобы знаки значения годографа в точке пересечения с реальной осью чередовались, и знаки значения годографа в точках пересечения с минимальной осью так же чередовались.
Если годограф проходит через начало координат, то такая система находится на границе устойчивости.
Критическим будем называть частоты, при которых годограф пересекает реальную ось.
