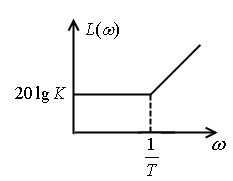
3.2.2 Инерционное звено
Инерционное звено описывается следующим дифференциальным уравнением:
![]() ,
,
 ,
,
 ,
,
![]() ,
,
где - коэффициент усиления
![]() - постоянная времени.
- постоянная времени.
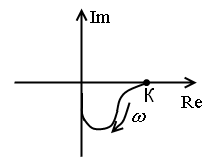
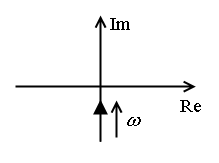
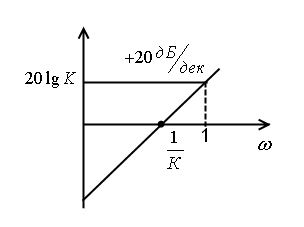
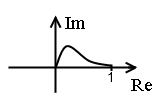
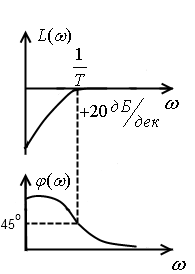
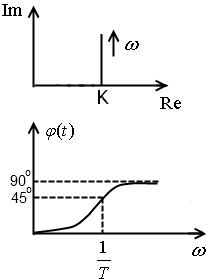
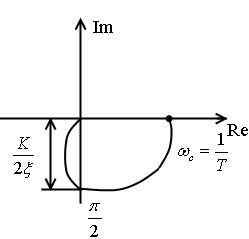
Годограф инерционного звена


 - передаточная функция
инерционного звена
- передаточная функция
инерционного звена
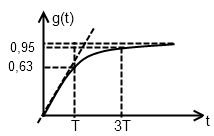
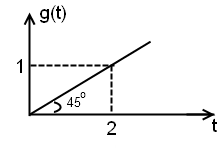
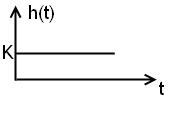
 - переходная характеристика
инерционного звена
- переходная характеристика
инерционного звена
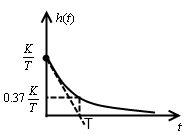
![]() - импульсная характеристика
- импульсная характеристика
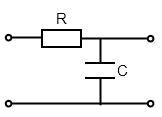
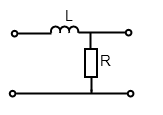
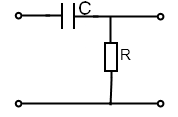
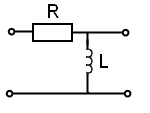
Реально инерционным звеном описывают RC и RL цепочки
Если полоса пропускания устройства сравнима с шириной спектра, то такое устройство можно описать инерционным звеном.
3.2.3 Интегрирующее звено (идеальное)
 ,
,
 ,
,
![]() ,
,
![]()
Годограф интегрирующего (идеального) звена имеет вид:
![]()
![]() ,
,
![]()
Переходная характеристика имеет следующий вид:
В качестве интегратора можно использовать двигатель, входной величиной которого является напряжение, а выходной – угол поворота.
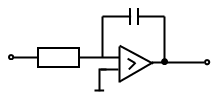
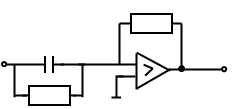
Интегрирующее звено можно реализовать на операционном усилителе:
3.2.4 Дифференцирующее звено (идеальное)
Описывается следующим дифференциальным уравнением
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]() .
.
Дифференцирующее звено можно реализовать на операционном усилителе:
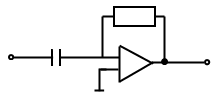
3.2.5 Реальное дифференцирующее звено
Реальное дифференцирующее звено описывается передаточной функцией:
 ,
,
![]() ,
,
 ,
,
 ,
,
![]()
3.2.6 Форсирующее звено
 ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()

Форсирующее звено можно реализовать на операционном усилителе:
3.2.7 Звено запаздывания
![]() ,
,
![]() - время запаздывания
- время запаздывания
![]()
![]()
![]()

Реальное звено запаздывания описывается линией задержки (кабельные, магнитостационарные и ультразвуковые).
3.2.8 Колебательное звено
Колебательное звено описывается следующим дифференциальным уравнением:
 ,
,
где - коэффициент усиления колебательного звена
![]() - относительный коэффициент
затухания
- относительный коэффициент
затухания
![]()
- постоянная времени
Передаточная функция:



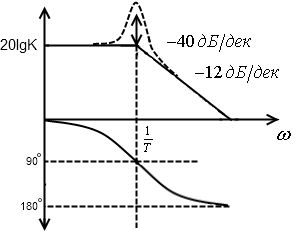

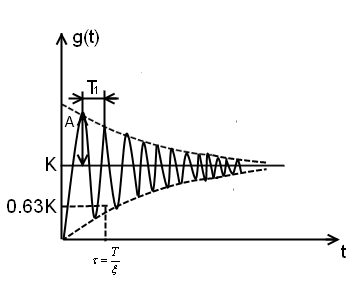
По переходной характеристике можно определить 3 параметра звена:
1. - по установившемуся значению:
2. по уровню
![]() можно определить значение
можно определить значение
![]() ,
,
![]()
Подставляя
![]() в
в
![]() и решая относительно
,
мы получи:
и решая относительно
,
мы получи:
Зная
![]() и
и
![]() ,
получим:
,
получим:

По уравнению зная и можно определить постоянную времени .
Колебательным звеном описывается колебательный контур.
3.3 Структурная схема систем радиоавтоматики (ра)
Структурной будем называть схему, у которой каждому преобразованию параметра соответствует определённое звено.
На структурную схему вводятся следующие обозначения:
![]() - некоторое линейное звено;
- некоторое линейное звено;
 - сумматор;
- сумматор;
 - вычитающее устройство;
- вычитающее устройство;
![]() - дискриминационная
характеристика.
- дискриминационная
характеристика.
3.3.1 Структурная схема систем апч
![]()
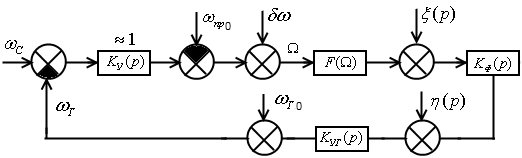
где
![]() - частота сигнала и гетеродина
соответственно
- частота сигнала и гетеродина
соответственно
![]() - передаточная функция АПЧ
- передаточная функция АПЧ
![]()
![]() - собственная частота настройки ЧД
- собственная частота настройки ЧД
![]() - ошибка настройки ЧД
- ошибка настройки ЧД
![]() - дискриминационная характеристика ЧД
- дискриминационная характеристика ЧД
![]() - внешние мешающие воздействия, приведенные
к выходу ЧД. Могут быть собственными –
это работа всевозможных электрических
установок, отражение от земной или
морской поверхности, излучение солнца,
звёзд, галактик. Внешние мешающие
воздействия могут быть специально
организованными.
- внешние мешающие воздействия, приведенные
к выходу ЧД. Могут быть собственными –
это работа всевозможных электрических
установок, отражение от земной или
морской поверхности, излучение солнца,
звёзд, галактик. Внешние мешающие
воздействия могут быть специально
организованными.
![]() - внутреннее возмущение (влияние
температуры, нестабильность питающих
напряжения, сторонние элементы, неточность
их изготовления)
- внутреннее возмущение (влияние
температуры, нестабильность питающих
напряжения, сторонние элементы, неточность
их изготовления)
![]() - номинальная частота гетеродина.
- номинальная частота гетеродина.
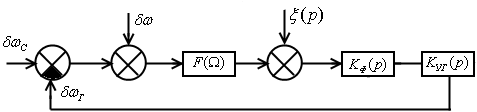
Если ввести отклонение
![]() и
и
![]() ,
то структурная схема упрощается и будет
иметь следующий вид:
,
то структурная схема упрощается и будет
иметь следующий вид:
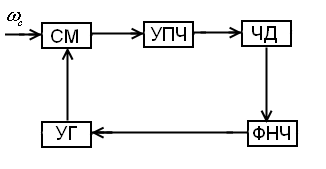
3.3.2 Структурная схема системы ФАПЧ
Функциональная схема будет иметь следующий вид:
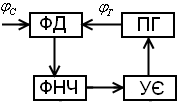
Структурная схема будет иметь следующий вид:

Так как ФД реагирует на фазу
гетеродина, а фаза гетеродина
пропорциональна интегралу от частоты,
то на структурной схеме появляется
звено с передаточной функцией
![]()
3.3.3 Структурная схема системы АСД
Функциональная схема будет иметь следующий вид:
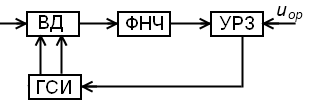
Структурная схема будет иметь следующий вид:

3.3.4 Структурная схема системы АСН
Структурная схема будет иметь следующий вид:

где
![]() - угловое положение цели
- угловое положение цели
![]() - угловое положение
равносигнальной зоны
- угловое положение
равносигнальной зоны
![]() - передаточная функция
исполнительного устройства
- передаточная функция
исполнительного устройства
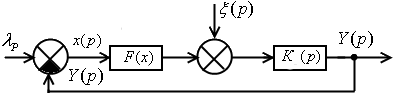
3.3.5 Обобщённая структурная схема системы РА
Обобщённая структурная схема систем РА будет иметь следующий вид:

где
![]() - информационный параметр (частота,
фаза, дальность, угол)
- информационный параметр (частота,
фаза, дальность, угол)
Если внешнее и внутреннее возмущение свести к выходу дискриминатора, то структурная схема упрощается, и будет иметь следующий вид: