

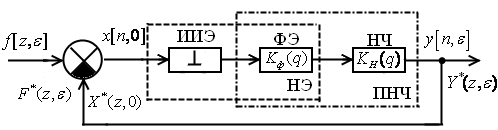
9.4.2 Уравнение и передаточная функция разомкнутой импульсной системы
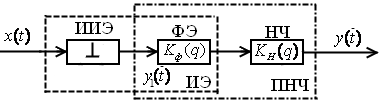
Из рисунка видно, что выходной
сигнал будет равен
 .
.
Полагая, что
![]() ,
получим уравнение разомкнутой системы
в области оригинала
,
получим уравнение разомкнутой системы
в области оригинала
 .
.
Вычислив - преобразования левой и правой части, получим уравнение разомкнутой импульсной системы в области оригинала
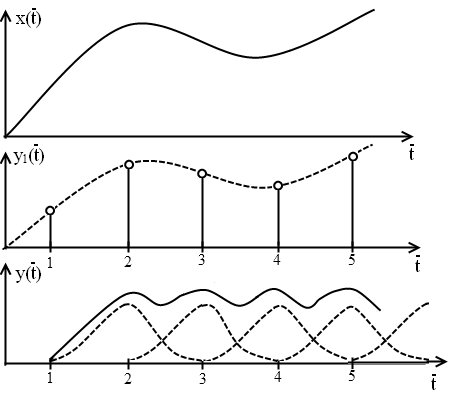
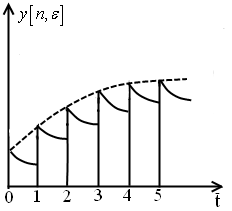
9.4.3 Переходные и установившиеся процессы разомкнутых импульсных систем
Решётчатую функцию выходного
сигнала можно найти из обратного
преобразования Лапласа
![]() .
.
Если
![]() ,
то решётчатая функция изображение её
будет равно
,
то решётчатая функция изображение её
будет равно
![]() ,
,
![]() .
.
9.4.4 Методика определения передаточной функции разомкнутой импульсной системы в области - преобразований
1. Определим передаточную
функцию непрерывной части в области
обычного преобразования Лапласа
![]() .
.
2. Найдём передаточную функцию непрерывной части в области безразмерного параметра
![]() .
.
3. Найдём передаточную функцию ФЭ для обычного преобразования Лапласа
![]() .
.
4. Найдём передаточную функцию ФЭ для безразмерного преобразования Лапласа
 .
.
5. Найдём передаточную функцию
ПНЧ
![]() .
.
6. Определим импульсную
характеристику для безразмерного
времени
![]() .
.
7. Найдём решётчатую импульсную
характеристику
![]() .
.
8. Найдём передаточную функцию
в области
-
преобразований
![]() .
.
Пример №1. Определить выходной
сигнал импульсной системы, ФЭ которой
представляет безынерционный усилитель,
а непрерывная часть является интегрирующим
звеном
 .
.
1. Определить передаточную функцию разомкнутой импульсной системы
1.1
 .
.
1.2
 .
.
1.3
![]() .
.
1.4
 .
.
1.5
 .
.
1.6
![]() .
.
1.7
![]() .
.
1.8
![]() .
.
2. Определим изображение
входного воздействия
![]()
![]() .
.
3. Найдём выходной сигнал
 ,
,
 ,
тогда
,
тогда
![]() .
.
Пример №2. Те же условия, но непрерывная часть являет собой инерционное звено.
1. Определить передаточную функцию разомкнутой импульсной системы
1.1
 .
.
1.2 .
1.3
 .
.
1.4
 .
.
1.4
 .
.
1.6
 .
.
2. Найдём выходной сигнал
 ,
,
 .
.
9.5 Анализ замкнутых систем прерывистого регулирования
9.5.1 Передаточная функция замкнутой системы прерывистого регулирования
Структурная схема системы прерывистого регулирования имеет следующий вид:
Система ничем не отличается
от разомкнутой, только ввели обратную
связь. Из рисунка видно, что
![]()
где
![]() - передаточная функция разомкнутой
системы.
- передаточная функция разомкнутой
системы.
Подставляя (2) в (1) и решая
уравнение относительно
![]() ,
получим:
,
получим:
 ,
отсюда передаточная функция по ошибке
,
отсюда передаточная функция по ошибке
 .
.
Подставляя (3) в (2), получим выражение для передаточной функции замкнутой системы:
 ,
,
где
![]() - характеристический полином замкнутой
системы.
- характеристический полином замкнутой
системы.
9.5.2 Установившейся и переходный режимы в замкнутых системах прерывистого регулирования
Изображение выходного сигнала имеет вид:

В установившемся режиме выходной сигнал определяется выражением
![]() .
.
9.6 Устойчивость замкнутых систем прерывистого регулирования
9.6.1 Требования к корням характеристического полинома
Для устойчивости системы необходимо и достаточно, чтобы
![]() .
.
Установим требования к корням
характеристического полинома в области
безразмерного преобразования Лапласа
![]() .
Найдя корни характеристического полинома
решётчатую функцию можно записать в
виде
.
Найдя корни характеристического полинома
решётчатую функцию можно записать в
виде
 .
.
В общем случае
![]() ,
,
где
![]() - нормированная частота, изменяющаяся
от 0 до
,
- нормированная частота, изменяющаяся
от 0 до
,
![]() - период дискретизации.
- период дискретизации.
Для устойчивости системы
необходимо, чтобы реальная часть корня
![]() была отрицательной
была отрицательной
![]() .
.
Так как
![]() изменяется от 0 до
мнимая часть корней должна лежать в
диапазоне от
до
изменяется от 0 до
мнимая часть корней должна лежать в
диапазоне от
до
![]() .
.
Для устойчивости замкнутой
системы прерывистого регулирования
необходимо и достаточно, чтобы корни
характеристического полинома замкнутой
системы лежали в левой полуплоскости
полосы
![]()
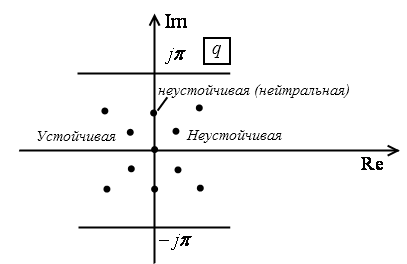
Если хотя бы один из корней лежит в правой полуплоскости, то система неустойчива. Если корни лежат на границе мнимой оси, то такая система нейтральная.
Обозначим
![]() ,
,
где
![]() - корни характеристического полинома
замкнутой системы
- корни характеристического полинома
замкнутой системы
![]() .
.
Найдём модуль корня устойчивой
системы
![]() .
.
Для устойчивости замкнутой системы необходимо и достаточно, чтобы все корни характеристического полинома были по модулю меньше 1 или лежали внутри круга единичного радиуса.
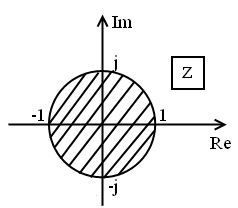
Для неустойчивой системы
корни по модулю больше 1
![]() .
.
Для нейтральной системы
![]() или лежат по окружности единичного
радиуса.
или лежат по окружности единичного
радиуса.