

6.4.1 Последовательная коррекция
1. Звено с запаздыванием по фазе.
Принципиальная электрическая схема имеет следующий вид:


ЛАЧХ и ЛФЧХ имеют следующий вид:



2. Звено с опережением по фазе.
Принципиальная схема имеет следующий вид:


ЛАЧХ и ЛФЧХ имеют следующий вид:



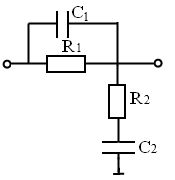
3. Интегро-дифференцирующее звено.
Принципиальная электрическая схема имеет следующий вид:

ЛАЧХ и ЛФЧХ имеют следующий вид:


Методика коррекции линейных систем
1. Построить ЛАЧХ и ЛФЧХ исходной системы.
2. Построить ЛАЧХ желаемой системы.
3. Вычитая из исходной желаемую ЛАЧХ, получим ЛАЧХ корректирующего звена.
6.4.2 Параллельные корректирующие звенья

Используют 2 типа обратной связи:
1. жёсткая обратная связь
действует по переменному и параллельному
току, когда включается в обратную связь
безынерционное звено
![]() .
.
2. гибкая обратная связь, когда
в обратную связь включают некоторое
динамическое звено
 .
.
При последовательной коррекции
результирующая передаточная функция
будет равна
![]() .
.
Приравнивая
![]() ,
получим
,
получим
 .
.
Пример №1. Охватим инерционное
звено передаточной функцией
![]() жёсткой обратной связью
.
жёсткой обратной связью
.
 .
.
Пример №2. Если охватить
гибкой обратной связью в виде реального
дифференцирующего звено
 безынерционное звено, то получим звено
эквивалентное последовательному звену
с запаздыванием по фазе.
безынерционное звено, то получим звено
эквивалентное последовательному звену
с запаздыванием по фазе.
Пример №3. если охватить
гибкой обратной связью в виде инерционного
звена
 безынерционное звено, то получим звено
эквивалентное звену с опережением по
фазе.
безынерционное звено, то получим звено
эквивалентное звену с опережением по
фазе.
Пример №4. Если охватить обратной связью в виде реального дифференцирующего звена инерционное звено , то получим интегро-дифференцирующее звено.
Методика параллельной коррекции
Пункты 1 – 3 повторить.
4. По заданной ЛАЧХ последовательного корректирующего звена определить передаточную функцию обратной связи.
Тема 7. Анализ нестационарных систем радиоавтоматики
Нестационарной называют
систему с переменными параметрами,
которая описывается дифференциальным
уравнением, у которого коэффициенты
и
![]() являются функциями времени.
являются функциями времени.
Сущность метода замораживания коэффициентов состоит в том, что вначале коэффициенты и считают постоянными. При этом условии исследуют устойчивость и точность квазилинейной системы. После этого анализируют влияние коэффициентов и на устойчивость и точность системы. (см. Первачёв С.В. «Радиоавтоматика», с.125-128)
Тема 8. Анализ нелинейных систем радиоавтоматики
8.1 Основные понятия. Нелинейные звенья
Нелинейными будем называть системы, которые описываются нелинейными дифференциальными уравнениями. К ним не применим принцип суперпозиций. Нелинейность приводит, как правило, к ухудшению точности, ухудшению устойчивости, уменьшению полосы захвата и полосы удержания, иногда нелинейности вводят специально. Например, релейное управление рулями ракеты ПВО, нелинейные корректирующие звенья. Часто удаётся выделить линейную инерционную часть и нелинейную безынерционную. Такие системы называют функциональными.
Типовые нелинейные звенья
1. Звено типа ограничение.

Описываются усилители,
детекторы, дискримина-
торы.
2. Звено типа зона нечувствительности.

Описываются электродвигатели, усилители, электромагнитные усилители.
3 .
Звено типа релейная характеристика
(без гистерезиса, жёсткий ограничитель).
.
Звено типа релейная характеристика
(без гистерезиса, жёсткий ограничитель).
Описываются ограничители, триггеры, ключи
4. Звено типа гистерезис.

Таким звеном описываются трансформаторы, катушки индуктивности с сердечником и другие ферромагнитные устройства.
5. Звено типа люфт.

Описываются редукторы и другие механические устройства.
6. Звено типа дискриминационная характеристика.

Этому звено соответствует частотный, фазовый, временной и угловой дискриминаторы.