

6.1.1 Методика определения дисперсии ошибки при случайных воздействиях
1. Определим передаточную функцию ошибки на воздействие
 .
.
2. Определим передаточную функцию ошибки для воздействия
 .
.
3. Определим дисперсию ошибки, вызванную воздействием
 .
.
4. Определим дисперсию ошибки, вызванную воздействием
 .
.
5. Найдём результирующую дисперсию ошибки
![]() .
.
Пример №1. Определить дисперсию
ошибки для случайного воздействия с
энергетическим спектром
![]() и передаточной функцией
и передаточной функцией
![]() .
.
1. Найдём передаточную функцию по ошибке
 .
.
2. Найдём дисперсию ошибки, вызванную воздействием
 ,
тогда
,
тогда

где
![]() - коэффициенты при полиномах.
- коэффициенты при полиномах.
Пример №2. Определить дисперсию
ошибки для
 для случайного воздействия с энергетическим
спектром
(белый шум)
для случайного воздействия с энергетическим
спектром
(белый шум)
1. Найдём передаточную функцию по ошибке
 ,
,
![]() .
.
2. Найдём дисперсию ошибки, вызванную воздействием
 ,
,
![]()

где
![]() .
.
Оптимальное значение
![]() можно найти из условия
можно найти из условия
 ,
тогда
,
тогда
 .
.
Если
![]() ,
то
,
то
 .
.
6.2 Оптимизация параметров линейных систем радиоавтоматики
Методы оптимизации зависят от следующих факторов:
1. структуры системы;
2. характера воздействия (детерминированные, случайные);
3. критерия оптимизации;
4. дополнительных ограничения.
От характера воздействия рассмотрим следующие случаи:
1.
и
![]() - детерминированные процессы;
- детерминированные процессы;
2. - детерминированный процесс, а - случайный процесс;
3. и - случайные процессы;
4. - приложенный к различным точкам системы.
6.2.1 Оптимизация параметров линейных систем в случае детерминированных процессов
В качестве критерия оптимизации выберем минимум суммарной ошибки
![]() .
.
1. Определим ошибку, обусловленную детерминированным полезным воздействием

2. Определим ошибку, вызванную детерминированным мешающим воздействием

3. Найдём результирующую ошибку
![]() .
.
4. Найдём оптимальное значение параметров из условия
 ,
решая систему этих уравнений, найдём
,
решая систему этих уравнений, найдём
![]() .
.
6.2.2 Оптимизация параметров линейных систем при детерминированном полезном и случайном мешающем воздействиях
В качестве критерия оптимизации
выберем минимум среднего квадрата
ошибки
![]() .
.
1. Определить ошибку, вызванную
2. Определить дисперсию ошибки, вызванную мешающим воздействием
 ,
,
где

3. Найдём средний квадрат ошибки
![]() .
.
4. Найдём оптимальное значение параметров из условия
, решая систему этих уравнений, найдём
![]() .
.
Пример №1. Определить
оптимальное значение параметров системы
с передаточной функцией
 в случае детерминированного полезного
воздействия
в случае детерминированного полезного
воздействия
![]() и помехи
с энергетическим спектром
и помехи
с энергетическим спектром
1. Найдём ошибку
![]()
1.1

1.2 Определим коэффициенты ошибок

1.3 Определим ошибку

2. Найдём дисперсию ошибки
2.1 Определим
![]()

2.2 Определим дисперсию ошибки

![]() ,
,

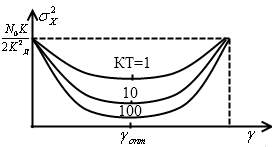
3. Определим средний квадрат ошибки
 .
.
Из выражения видно, что
увеличивая
![]() уменьшается
уменьшается
![]() .
С увеличением
.
С увеличением
![]()
![]() в начале уменьшается, а затем увеличивается.
Из этого следует, что существует
оптимальное значение параметров
в начале уменьшается, а затем увеличивается.
Из этого следует, что существует
оптимальное значение параметров
![]() и
.
и
.
4. Найдём оптимальное значение и из условия:

