

2.3. Дифференциальное уравнение движения точки под действием постоянной системы сил, восстанавливающей силы и силы сопротивления движению
Рассмотрим движение материальной точки по гладкой горизонтальной поверхности, происходящее под действием постоянной системы сил, восстанавливающей силы и силы сопротивления движению, пропорциональной первой степени скорости (рис. 2.4).
Как и ранее, начало системы отсчета поместим в положение статического равновесия точки. В этом положении пружина не деформирована, т. е. имеет длину l0. При оформлении рис. 2.4 используются рекомендации, приведенные в алгоритме решения вторых задач динамики точки.
Основное уравнение динамики в рассматриваемом случае имеет вид
ma = ΣFi + ΣRi = G + N + Rc + Fyn,
где G – сила тяжести; N – нормальная реакция; Rc – сила сопротивления движению точки; Fyn – сила упругости пружины.
Рис. 2.4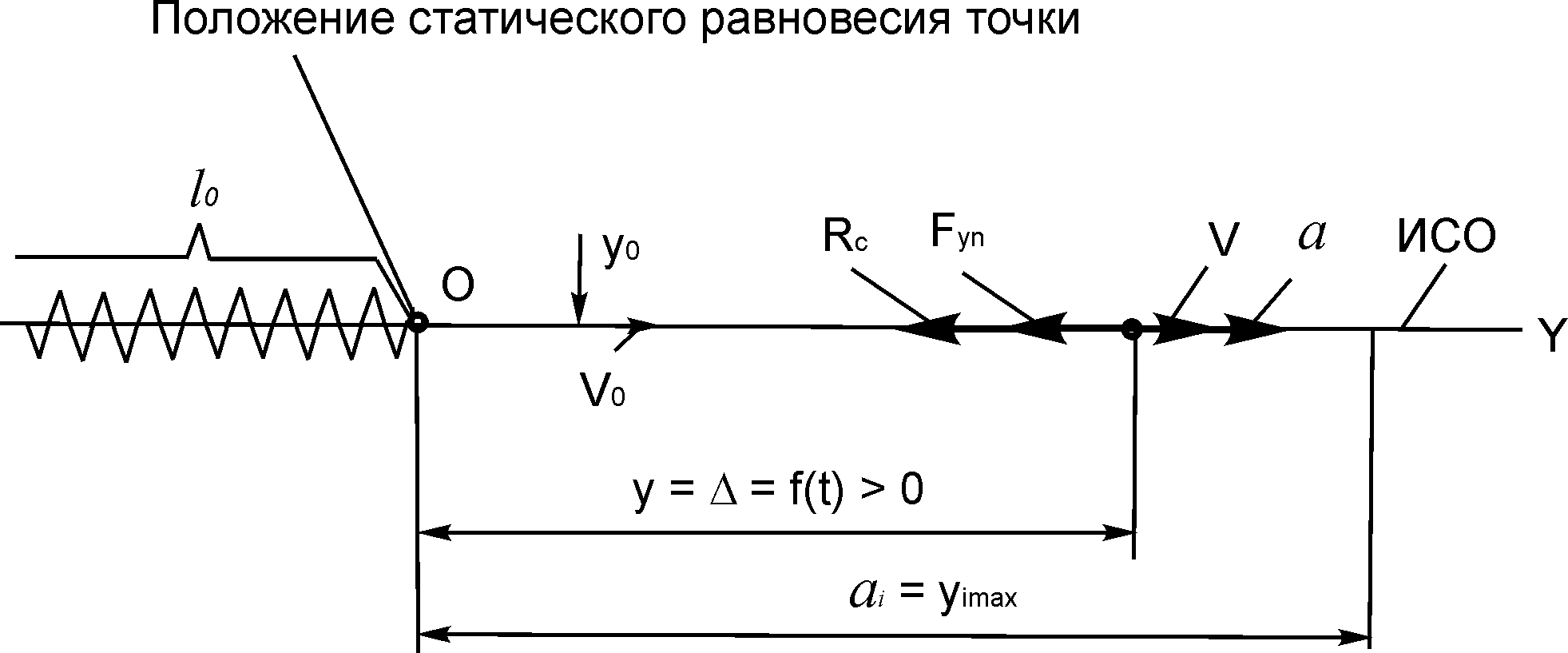
Так как силы G и N на кинематические параметры точки не влияют, то они на рис. 2.4 не показаны.
Сила Rc сопротивления движению точки зависит от внешней среды, в которой эта точка перемещается.
Рассмотрим вариант, при котором сила Rc пропорциональна первой степени скорости V точки. Примером такой силы является сопротивление воздуха при движении тела. В этом случае силу Rc определяют по формуле Rc = – αV, где α – постоянный коэффициент пропорциональности, имеющий размерность [Н/(м/с)]. Коэффициент α численно равен силе сопротивления при скорости движения точки, равной 1 м/с. Сила сопротивления Rc всегда направлена в сторону, противоположную направлению скорости V.
Запишем дифференциальное уравнение горизонтального движения точки:
m = ΣFioy + ΣRioy = – α – cy.
Это уравнение приведем к виду
+ (α/m) + (c/m)y = 0.
Введем условные обозначения: α/m = 2n; c/m = k2. С учетом коэффициентов n, k дифференциальное уравнение движения приводится к стандартному виду:
![]() ,
,
где n – коэффициент, характеризующий сопротивление среды и имеющий размерность [рад/с] или [c-1].
В зависимости от соотношения величин n и k материальная точка может совершать или колебательное, или апериодическое (неколебательное) движение.
2.4. Затухающие колебания материальной точки
Рассмотрим первый вариант движения точки, при котором n < k. В этом варианте общее решение дифференциального уравнения имеет два вида:
y
= e-nt(C1cos((![]() )t)
+ C2sin((
)t));
)t)
+ C2sin((
)t));
y = ae-ntsin(( )t + β),
где С1, С2, a, β – постоянные интегрирования, определяемые по начальным условиям движения.
Эти выражения называют уравнениями затухающих колебаний материальной точки.
Пусть начальными условиями движения являются: t0 = 0; y0; . В этих условиях первый вид решения дифференциального уравнения выражается формулой
y = e-nt(y0cos(( )t) + (( +ny0)/ )sin(( )t)).
Постоянную величину называют циклической частотой затухающих колебаний k*, которую определяют по формуле
k* = .
Величина k* определяет число полных колебаний за промежуток времени, равный 2π = 6,28 с. Тогда имеем
y = e-nt(y0cos(k*t) + (( + ny0)/k*)sin(k*t)).
Как правило, для практических расчетов используют второй вид общего решения дифференциального уравнения движения точки.
y = ae-ntsin(k*t + β),
где (k*t + β) – фаза затухающих колебаний; β – начальная фаза; a – постоянная интегрирования.
Для определения постоянных интегрирования a и β используют следующую совокупность формул:
а
=
![]() ;
;
tgβ
= y0k*/(![]() );
);
sinβ = y0/ a;
cosβ = ( )/(аk*).
Для характеристики затухающих колебаний используют понятие «период затухающих колебаний Т*».
Период затухающих колебаний – промежуток времени между двумя последовательными прохождениями точки в одном направлении через положение покоя.
Период
затухающих колебаний (![]() = 2π/k*)
больше периода свободных колебаний (T
= 2π/k)
точки.
= 2π/k*)
больше периода свободных колебаний (T
= 2π/k)
точки.
Н
Рис. 2.5
На рис. 2.5 использованы начальные условия движения точки, приведенные на рис. 2.4. График затухающих колебаний располагается в зоне, ограниченной двумя кривыми линиями, описываемыми математическими выражениями: y = аe-nt; y = – аe-nt.
Для характеристики затухающих колебаний используют также понятие «амплитуда аi затухающих колебаний».
Амплитуда затухающих колебаний – величина наибольшего отклонения точки в ту или другую сторону от положения статического равновесия в течение каждого колебания.
Из рис. 2.5 видно, что амплитуда затухающих колебаний переменна. При этом последующая амплитуда аi+1 меньше предыдущей амплитуды аi. Это уменьшение характеризуется отношением
аi+1/ аi = e– nT*/2 = const.
Число e– nT*/2 называют декрементом колебаний; натуральный логарифм, т. е. величину nT*/2, называют логарифмическим декрементом.
Зная предыдущее значение аi амплитуды, последующее значение аi+1 находят по формуле
аi+1 = аi e– nT*/2.
Следует отметить, что в некоторых учебниках коэффициент n сопротивления среды называют коэффициентом затухания.
Практика показывает, что затухание колебаний происходит очень быстро даже при малом сопротивлении. Так, например, при n = 0,05k имеем Т*= 1,00125Т, e–nT* = 0,7301, т. е. период Т* затухающих колебаний отличается от периода Т свободных колебаний лишь на 0,125 %, а амплитуда аi за время одного полного колебания уменьшается на 0,27 своей величины, и после 10 полных колебаний становится равной 0,043 своего первоначального значения.
Таким образом, основное влияние сопротивления на свободные колебания материальной точки выражается в уменьшении амплитуды колебаний с течением времени, т. е. в затухании колебаний.
Затухающие колебания называют также колебаниями с малым сопротивлением внешней среды.