

Постановка задачи
Задача 1 (поступательное движение). Тело массой m, на которое действуют движущая сила Fд = Fд(S) и сила сопротивления Fс, разгоняется на участке пути Sр. После этого действие движущей силы прекращается (сила Fс продолжает действовать), начинается тор-можение, в процессе которого тело пройдет до остановки расстояние SТ за счет накопленной при разгоне кинетической энергии.
Требуется:
определить зависимости от пути S скорости v(s), ускорения a(s), времени t(s);
установить время Tр прохождения телом участка Sр и время ТТ прохождения участка SТ;
по полученным данным построить графики v(s), a(s), t(s) для интервала перемещения [0, Sр + SТ].
Задача 2 (вращательное движение вала). Вал с моментом инер-ции J0, на который действуют момент движущих сил Мд = Mд() и момент сил сопротивления Мс, разгоняется при повороте на угол р. После этого действие движущего момента прекращается (момент Мс продолжает действовать), начинается торможение, в процессе которого вал повернется до остановки на угол Т за счет накопленной при разгоне кинетической энергии.
Требуется:
определить зависимости от угла поворота скорости (), ускорения (), времени t();
установить время Tр поворота на угол р и время ТТ поворота на угол Т;
по полученным данным построить графики (), (), t() для угла поворота [0, р + Т].
Математическая модель задачи. Анализ поступательного и вращательного движений тел показывает, что исходными данными для определения параметров движения (перемещения, скорости, ускорения, времени) являются массы (m) и моменты инерции (J0), движущие силы (Fд) и моменты (Mд), силы (Fc) и моменты (Mc) сопротивления, а также начальные значения параметров движения.
При использовании дискретной модели задачи весь путь (линейный и угловой) разбивается на некоторое количество элементарных участков длиной S = Si - Si-1 (при вращательном движении = i - - i-1) (рис. 3.2).
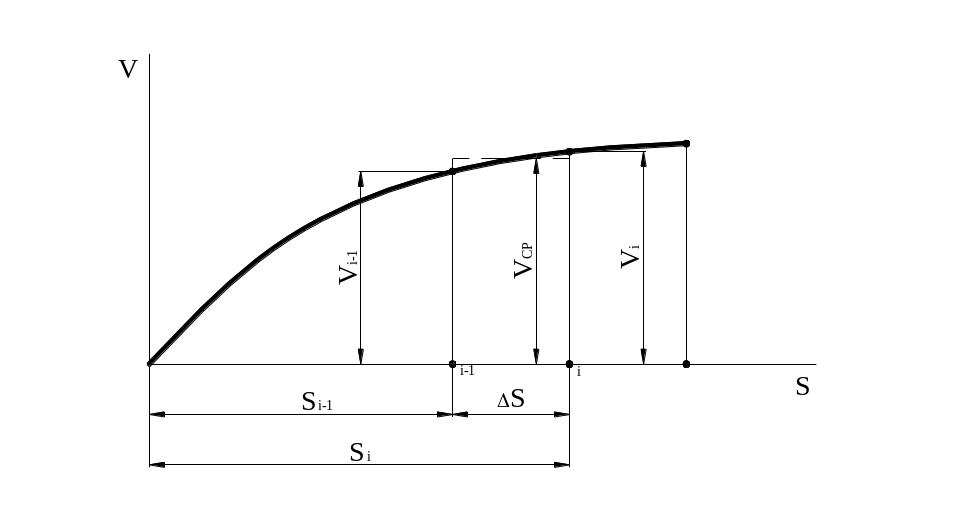
Рис. 3.2. Расчетная схема
На каждом интервале связь кинематических, силовых и массовых параметров описывается теоремой об изменении кинетической энергии, в частности:
для поступательного движения
 ;
(3.1)
;
(3.1)
для вращательного движения
 ,
(3.2)
,
(3.2)
откуда можно выразить скорость движения:
 (3.3)
(3.3)
или
 .
(3.4)
.
(3.4)
При определении времени t прохождения участка S (или ) будем считать скорость движения постоянной, равной средней скорости в пределах участка:
![]() .
.
Тогда![]() ,
,
откуда
![]()
или
![]() .
(3.5)
.
(3.5)
Аналогично, предполагая, что ускорение ai на участке S (или ) постоянно, имеем
![]() .
(3.6)
.
(3.6)
Применим построенную математическую модель к расчету параметров поступательного движения тела на участке разгона [0, Sр] и на участке торможения [Sр, Sр + SТ] (рис. 3.3).
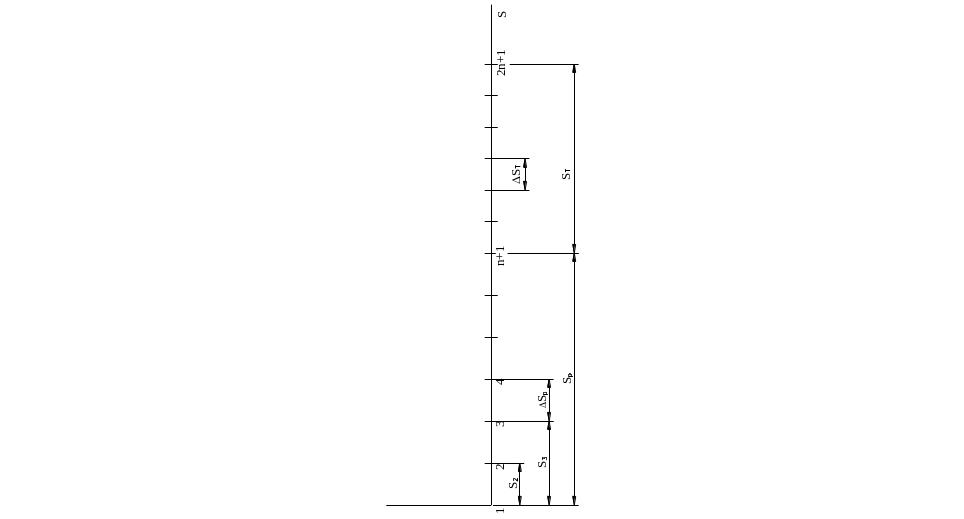

Разобьем
каждый из участков движения на n
равных элементарных участков длиной
![]() и
и
![]() соответственно. Полученные промежуточные
положения тела пронумеруем от 1 до 2n
+ 1. Переменная i
определяет номер промежуточного
положения тела. К участку разгона
относятся положения с номерами от 1 до
n
+ 1.
соответственно. Полученные промежуточные
положения тела пронумеруем от 1 до 2n
+ 1. Переменная i
определяет номер промежуточного
положения тела. К участку разгона
относятся положения с номерами от 1 до
n
+ 1.
Начальные параметры
движения в положении i
= 1 считаются известными и равными S1
= 0, v1
= 0, t1 = 0. Начальное
ускорение a1
определяется из закона Ньютона
![]() ,
который в нашем случае при i
= 1 примет вид
,
который в нашем случае при i
= 1 примет вид
![]() ,
,
где FД(S1) определяется с учетом задания на курсовую работу (см. табл. 3.1 или табл. 3.2).
Например, если в задании FД(S) = F0 + S2, то FД(S1) = F0 + S12.
Для остальных положений тела при i =2,..., n + 1 параметры движения определяются в соответствии с математической моделью по формулам
![]() или
или
![]() ;
(3.7)
;
(3.7)
; (3.8)
; (3.9)
![]() ;
(3.10)
;
(3.10)
![]() .
(3.11)
.
(3.11)
Интеграл int
= в формуле (3.8) содержит аналитически
заданную подынтегральную функцию f(s)
= FД(S)
- Fс
с переменной интегрирования S.
Он может быть вычислен:
в формуле (3.8) содержит аналитически
заданную подынтегральную функцию f(s)
= FД(S)
- Fс
с переменной интегрирования S.
Он может быть вычислен:
точно – с использованием первообразной по формуле НьютонаЛейбница;
приближенно – по методу трапеций.
Расчет параметров
движения на участке торможения требует
предварительного определения его длины
SТ.
При этом исходим из условия, что вся
накопленная при разгоне кинетическая
энергия
![]() расходуется на преодоление силы
сопротивления Fс,
совершающей работу Aс
= Fc
ST,
т.е.
расходуется на преодоление силы
сопротивления Fс,
совершающей работу Aс
= Fc
ST,
т.е.
![]() ,
,
откуда
![]() .
(3.12)
.
(3.12)
Начальные
параметры для участка торможения,
соответствующие положению i
= n
+ 1, частично являются известными. Так,
из процесса разгона получены Sn+1,
vn+1,
tn+1.
При переходе к торможению имеет место
разрыв функции ускорения. Новое значение
ускорения, соответствующее началу
участка торможения, равно
![]() .
.
Параметры движения в промежуточных положениях участка торможения при i = n + 2,…, 2n + 1 определяются следующим образом:
![]() ;
;
 ;
;
![]() ;
;
;
![]() .
.
Быстродействие на участке разгона будет равно Тр = tn+1, а на участке торможения – ТТ = t2n+1 - tn+1.
Алгоритм решения задачи.
1. Исходные данные (ввод): m, F0, Fс, Sр, n
2.
![]()
3.
Для первого положения S1
= 0, v1
= 0, t1
= 0,
![]()
4. Для остальных положений при i = 2,..., n + 1
4.1.
![]()
4.2. int вычисляется по формуле трапеций
![]()
4.3.
4.4.
4.5.
![]()
4.6.
![]() .
.
5. Вывод параметров движения для разгона при i = 1,..., n + 1
5.1. Вывод i, Si, vi, ai, ti.
6. Вывод быстродействия для участка разгона Tр = tn+1.
Для участка торможения алгоритм имеет следующий вид:
7.
![]() ;
;
8.
![]() ;
;
9.
![]() .
.
Далее алгоритм решения имеет вид, аналогичный участку разгона.