

Курсовая работа4 / 2008-05-23-00-39-Anne- работа 3
.doc
Кафедра ОТУ
Дисциплина «Основы теории управления»
Отчет по курсовой работе
Синтез системы управления по заданным показателям качества
Вариант 1
Выполнил Чистиков П.Г.
Никандрова Е.В.
Факультет КТИ
Группа № 5351
Преподаватель Новожилов И.М.
Санкт-Петербург
2019
Структурная схема системы

Р – регулятор
ОУ – объект управления
Порядок выполнения работы
-
Исходя из заданной величины установившейся ошибки εу определить требуемый коэффициент передачи регулятора kр.
-
Ввести полученную передаточную функцию Wp(s) = kpW0(s) и определить устойчивость показателей качества tp, σ, εу.
-
Осуществить ручной синтез желаемой передаточной функции Wж(s) в следующем порядке:
-
По заданному времени регулирования tp определить начальную частоту среза системы ωс и задать асимптоту Lж(ω) с наклоном -20дБ/дек
-

-
Задать запасы по амплитуде ΔL1 и ΔL2 порядка (20-25)дБ.
-
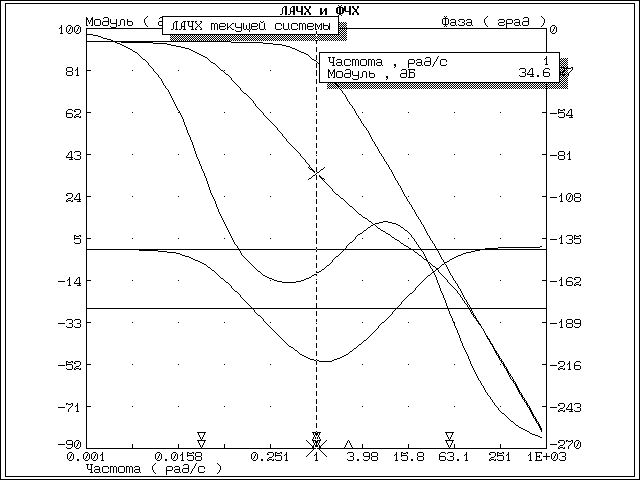
Осуществить стыковку с характеристикой Lр(ω) асимптотами с типовыми наклонами -20, -40, или -60 дБ/дек. Пример на рис.1.

-
Восстановить передаточную функцию желаемой системы Wж(s).
-
ввести в ПЭВМ и рассчитать показатели качества: tp, σ, εу. Привести положение корней, ЛЧХ, вид переходного процесса.
-
Изменяя положение частоты среза и запасы ΔL1, ΔL2 провести итерационную процедуру минимизации времени переходного процесса. Привести графики зависимости tp = f(ωc) и σ = f(ΔL2).
-
Для полученного tmin записать Wж(s) и рассчитать последовательную коррекцию Wk(s). Привести ЛЧХ, Lk(ω) и φk. Ввести Wk(s) в регулятор и провести проверочный расчет показателей качества.
-
Дать выводы по работе.
Вариант курсовой работы
|
№ вар. |
W0(s) |
Значение параметров W0 |
Заданные показатели качества |
|||
|
xy(t) |
εy |
tp |
σ |
|||
|
1 |
|
Т = 1с |
a = const |
≤ 0.001% |
≤ 20с |
≤ 30% |
-
Определим требуемый коэффициент передачи.
Порядок астатизма в исходной системе
![]() ,
входной сигнал – линейный. Следовательно
величина установившейся ошибки
,
входной сигнал – линейный. Следовательно
величина установившейся ошибки
![]() .
Возьмём а=1, тогда
.
Возьмём а=1, тогда
![]() .
Для удобства будем считать
.
Для удобства будем считать
![]()
-
Передаточная функция системы
![]()
Характеристический полином разомкнутой системы:
![]()
![]()
Передаточная функция замкнутой системы:
![]()
![]()
Характеристический полином замкнутой системы:
![]()
Критерий Гурвица: характеристическое
уравнение не будет иметь корней в правой
полуплоскости, а следовательно, система
будет устойчива, если все диагональные
миноры, они же частные определители
Гурвица
![]() .
.
![]()

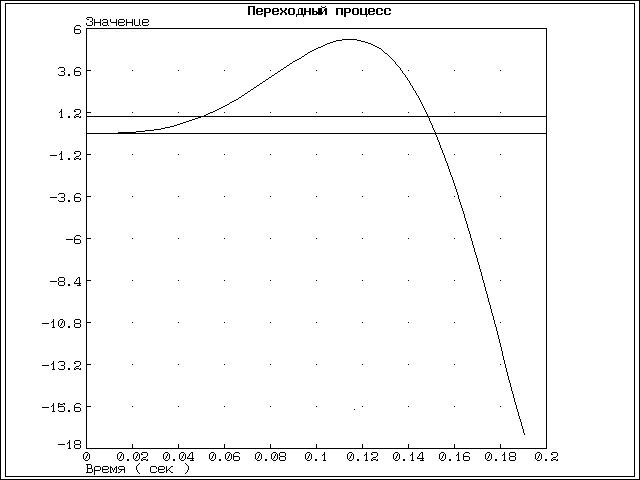
Система является неустойчивой.
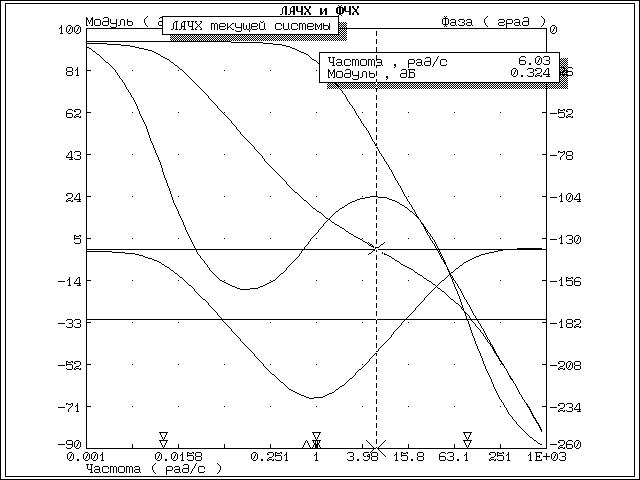
Проверим устойчивость системы по критерию Найквиста. Для этого рассмотрим ЛАЧХ разомкнутой системы.
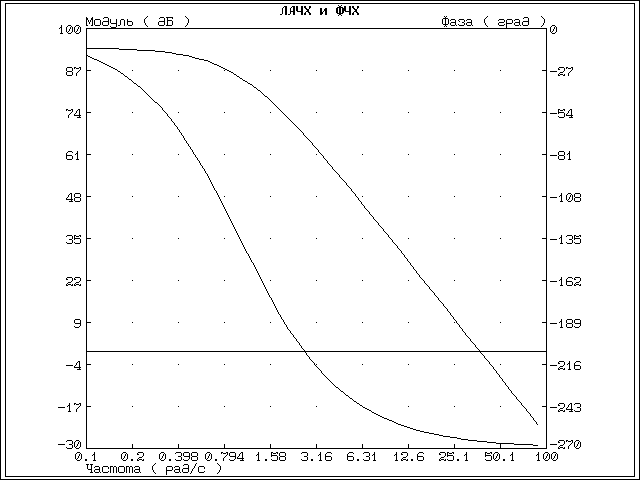
По критерию Найквиста система неустойчива.
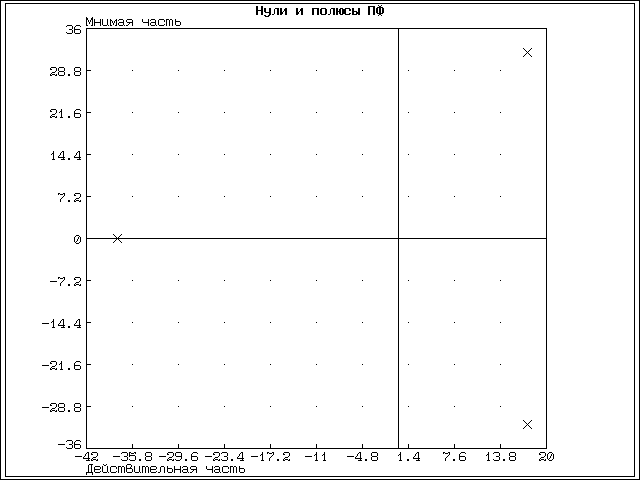
У характеристического полинома есть корни, лежащие в правой полуплоскости.
-
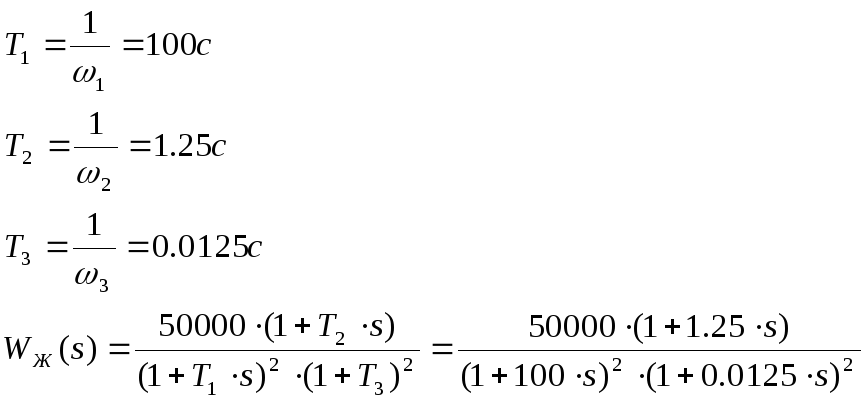
Осуществим ручной синтез желаемой передаточной функции
 .
.
а) 1-й вариант построения желаемой характеристики:


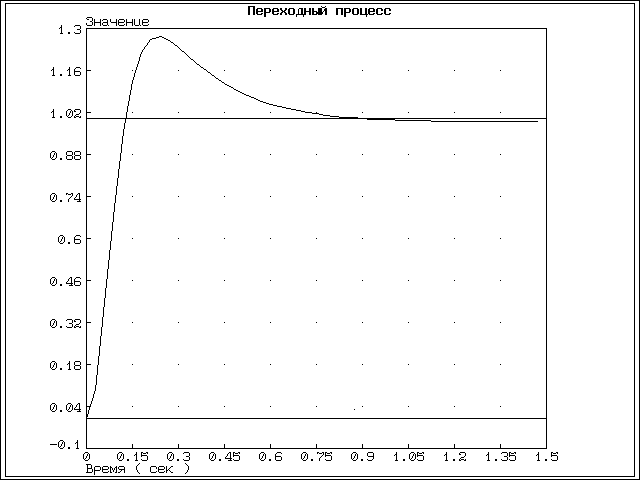
Показатели качества, полученной системы:


Значение перерегулирования не удовлетворяет заданным критериям качества.
б) 2-й вариант построения желаемой характеристики:

Показатели качества, полученной системы:

в) 3-й вариант построения желаемой характеристики:
Показатели качества, полученной системы:

г) 4-й вариант построения желаемой характеристики:

Показатели качества, полученной системы:


д) 5-й вариант построения желаемой характеристики:


Показатели качества, полученной системы:

-
Построим графики зависимости

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
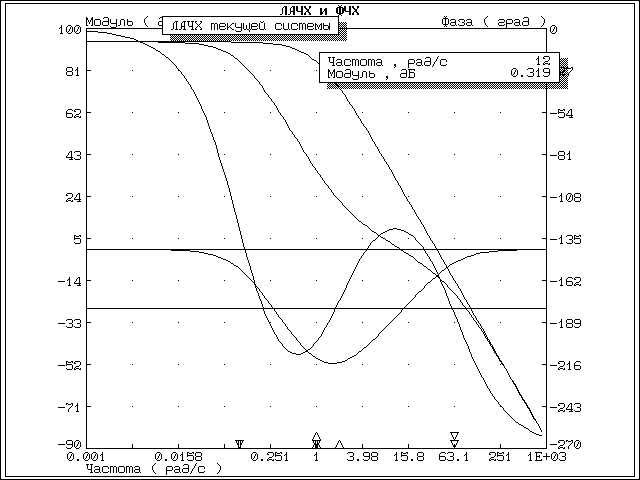
Из графиков видно, что оптимальный
вариант желаемой характеристики –
характеристика с частотой среза
![]() .
В этом случае показатели качества
системы удовлетворяют заданным. При
попытке улучшить показатели, мы увеличим
перерегулирование.
.
В этом случае показатели качества
системы удовлетворяют заданным. При
попытке улучшить показатели, мы увеличим
перерегулирование.
-
Запишем
 и рассчитаем последовательную коррекцию
и рассчитаем последовательную коррекцию

П оследовательная
коррекция: корректирующее звено
включается последовательно с передаточной
функцией реальной системы.
оследовательная
коррекция: корректирующее звено
включается последовательно с передаточной
функцией реальной системы.
ε
xy(t)
y(t)
Тогда передаточная функция корректирующего звена:
![]()

Вывод: В результате лабораторной
работы была сформирована желаемая
передаточная функция, удовлетворяющая
заданным показателям качества. При
помощи графиков зависимости
![]() было
показано, что она является оптимальной.
было
показано, что она является оптимальной.