

Курсовая работа / курсовик / курсовик
.docСанкт-Петербургский государственный электротехнический университет «ЛЭТИ»
кафедра ВТ
Курсовая работа по дисциплине
Основы теории управления.
Выполнили: студенты гр. 3372
Тарасов А.
Волобуев К.
Графов П.
Проверил: Канатов И. И.
Санкт-Петербург,
2006 г.
Задание для курсовой работы.
Разработать САУ высотой летательного аппарата на воздушном шаре. Целью разработки системы является оптимизация ее быстродействия, точности и устойчивости. Для этого необходимо проанализировать систему и ввести корректирующие звенья.
Входным параметром системы является плотность газа (воздуха) внутри шара pш.
Выходным параметром системы является высота летательного аппарата h.
Разность плотностей газа в шаре и вне него обеспечивает подъем на некоторую высоту h.
Структурная схема системы.
Структурная схема системы приведена на рис. 1.
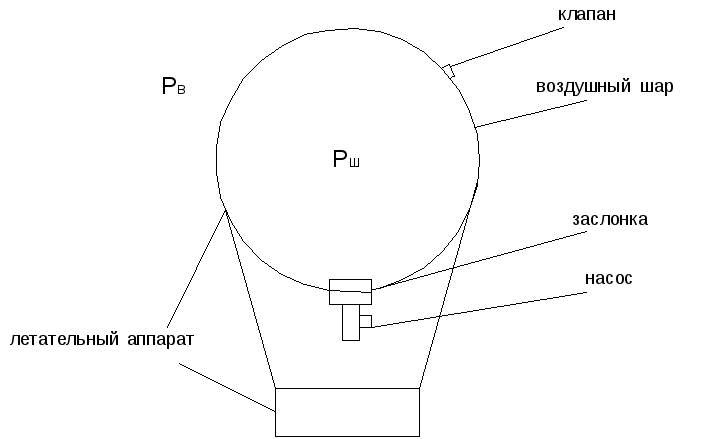
Рис.1.
Она включает в себя:
-
Устройство управления (заслонка+насос).
-
Исполнительный механизм (собственно воздушный шар + клапан).
-
Объект управления (летательный аппарат).
-
Датчик высоты.
Объект управления набирает высоту за счет разницы разности плотностей (давлений) в шаре и вне него. Следовательно уравнение динамики летательного аппарата будет иметь вид:
![]() (1),
(1),
где
![]() - это сила тяготения, равная
- это сила тяготения, равная
![]() ,
а
,
а
![]() - подъемная сила (фактически Архимедова
сила, равная произведению разницы
плотностей, объема шара и ускорения
свободного падения).
- подъемная сила (фактически Архимедова
сила, равная произведению разницы
плотностей, объема шара и ускорения
свободного падения).
Функциональная схема устройства.
Функциональная схема системы приведена на рис. 2.:

Передаточные функции звеньев системы.
Устройство управления.
УУ является идеальным усилительным звеном.
![]() ,
где
,
где
![]() -
скорость заполнения шара газом
-
скорость заполнения шара газом
![]() .
.
Переходная характеристика:
Исполнительный механизм.
Исполнительный механизм (ИМ) – воздушный шар, имеющий клапан на своей оболочке. Взлет летательного аппарата осуществляется за счет наполнения воздухом шара. Когда процесс наполнения (увеличения плотности) достигает некоторого критического уровня, достаточного для подъема всего устройства, открывается клапан, поддерживающий величину плотности постоянной.
Следовательно, процесс заполнения шара газом можно представить в виде выражения:
![]() .
(2)
.
(2)
Или с помощью графика:
Осуществляя операторное преобразование Лапласа над выражением 2, получаем:
![]()
Тогда передаточная функция всего звена будет иметь вид:
![]() , т.е. ИМ – апериодическое звено.
, т.е. ИМ – апериодическое звено.
Объект управления.
Поскольку, из второго закона Ньютона, наличие ускорения у тела (материальной точки) есть следствие приложенной к нему силы, и ускорение есть вторая производная перемещения (высоты ОУ h) по времени, то запишем:
![]()
![]()

Осуществляя операторное преобразование Лапласа, получаем:
![]() или, заменяя
или, заменяя
![]() на
на
![]() ,
,
![]() ,
т.е. ОУ – два последовательных интегрирующих
звена.
,
т.е. ОУ – два последовательных интегрирующих
звена.
То есть набор высоты летательным аппаратом можно представить в виде графика:

Датчик обратной связи.
Датчик ОС считывает высоту ОУ нал поверхностью, никак не влияя на нее. поэтому вся система замкнута единичной обратной связью.
![]()
Передаточная функция САУ.
Теперь, исходя из функциональной схемы устройства, можно найти передаточную функцию всей системы, используя формулу для последовательного включения звеньев и формулу замыкания.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Заменяя постоянные некоторыми числами, получим:
![]() при
при
Анализ исходной системы.
Проанализируем исходную систему на устойчивость. Для устойчивости системы в замкнутом состоянии необходимо, чтобы фазовая характеристика в разомкнутом состоянии пересекала уровень –π правее частоты среза.
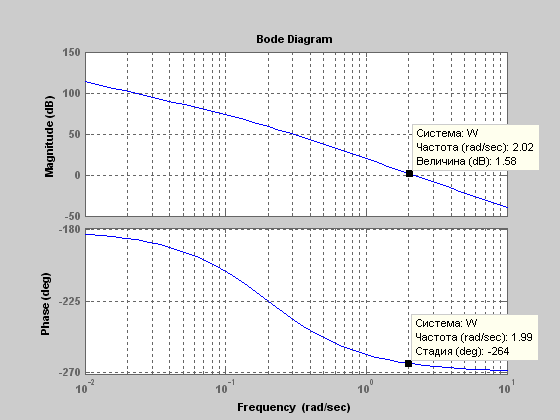
Как видно из рисунка, фазовая характеристика всегда находится ниже уровня –π. Поэтому данная система не является устойчивой и её переходный процесс, вызванный подачей на вход единичной «ступеньки», будет расходиться:

Коррекция системы.
Рассмотрим следующие типы коррекции исходной системы:
-
Добавление корректирующего звена в прямую цепь.
-
пассивная коррекция.
-
активная коррекция.
-
Коррекция обратной связи.
-
Получение желаемой функции передачи.
При этом рассмотрим несколько вариантов каждого из корректирующих методов и выберем лучший, исходя из критериев быстродействия, точности и устойчивости.
Пассивное корректирующее звено.
При помощи пассивного корректирующего звена можно создать фильтр, который сдвинет влево частоту среза и поднимет фазу в районе этой частоты. Зададим такой фильтр последовательным соединением следующих звеньев, включенных в прямую исходную цепь:


Выбирая различный X, находим оптимальный переходный процесс:

???Оптимальный переходный процесс достигается при X = 0.03. При этом достигается максимальная устойчивость при среднем быстродействии.
Временные оценки качества этого переходного процесса:
-
Время достижения установившегося значения
 .
. -
Время достижения первого максимума
 .
. -
Логарифмический декремент затухания

ЛАЧХ и ЛАФХ пассивного корректирующего звена, исходной системы и скорректированной системы изображены на графике:

Задачей данного корректирующего звена является не перемещение частоты среза влево, а подъем фазовой характеристики в районе этой частоты. Поэтому данное корректирующее звено расположено несеммитрично относительно частоты среза.
По графику видно, что в скорректированной системе есть запас по фазе 13 градусов, чего достаточно для устойчивости в замкнутой системе. При этом запас по амплитуде составляет всего около 10 dB.
Выводы: пассивное корректирующее звено устранило неустойчивость системы, но достаточно сильно исказило ЛАЧХ. Преимуществом такой коррекции является то, что она работает только на небольшом диапазоне частот, не требует дополнительной мощности и легко реализуема в реальных системах.
Активное корректирующее звено.
При помощи активного корректирующего звена можно уменьшить наклон ЛАЧХ в районе частоты среза так, чтобы ЛАЧХ пересекала 0 под минимальным углом. За счет этого достигается замедление фазы и сдвиг вправо частоты среза. При правильном подборе коэффициентов корректирующего звена можно добиться того, что пересечение фазой уровня –π окажется правее пересечения нуля ЛАЧХ.
Введем следующее активное корректирующее звено:
![]()
Подбирая коэффициент Х, двигаем звено в разные стороны относительно частотной оси и выбираем оптимальный переходный процесс:
Оптимальный переходный процесс достигается при Х = 0.7. Временные оценки качества этого переходного процесса:
-
Время достижения установившегося значения
 .
. -
Время достижения первого максимума
 .
. -
Логарифмический декремент затухания
 .
.
Как видно из графиков, все переходные процессы обладают слабой устойчивостью. Модифицируем звено коррекции таким образом, чтобы фаза в районе частоты среза поднималась еще больше:
![]()
Подбирая коэффициент Х, двигаем звено в разные стороны относительно частотной оси и выбираем оптимальный переходный процесс:

Оптимальный переходный процесс достигается при Х = 0.012. Временные оценки качества этого переходного процесса:
-
Время достижения установившегося значения
 .
. -
Время достижения первого максимума
 .
. -
Логарифмический декремент затухания
 (колебаний нет).
(колебаний нет).
Переходные процессы при модифицированном звене активной коррекции гораздо лучше по всем параметрам.
ЛАЧХ и ЛАФХ корректирующего звена, исходной системы и скорректированной системы изображены на графике:
По графикм видно, что ЛАЧХ скорректированной цепи пересекает ноль под меньшим углом, но это пересечение сдвинуто вправо. При этом фазовая характеристика пересекает –π гораздо поже. Запас по фазе составляет 63 градуса, по амплитуде – 20 dB.
Выводы: активное корректирующее звено сделало систему устойчивой. Преимуществом такой системы является меньшая степень искажения оригинальной ЛАЧХ. Недостаток состоит в том, что активные цепи сложнее реализуемы (особенно на высоких частотах) и требуют дополнительных затрат мощности.
Коррекция при помощи обратной связи.
Наиболее сильно на систему влияет исполнительное устройство, т.к. является двойным интгратором и с низких частот дает наклон ЛАЧХ -40 db/Dec. Поэтому корректировать обратной связью имеет смысл именно это звено.
Введем коррекцию обратной связью для исполнительного устройства таким образом, чтобы на низких частотах сохранялась исходная ЛАЧХ, а в районе частоты среза происходило пересечение нуля под минимальным наклоном:
![]()
Таким образом, приводим цепь к следующему виду:

Такое звено имеет большой наклон (+60 dB/dec) на низких частотах, что позволяет «перекрыть» исходную ЛАЧХ, и излом в районе частоты среза, благодаря которому и производится коррекция. Коэффициент Х определяется исходя из оптимальности переходного процесса.
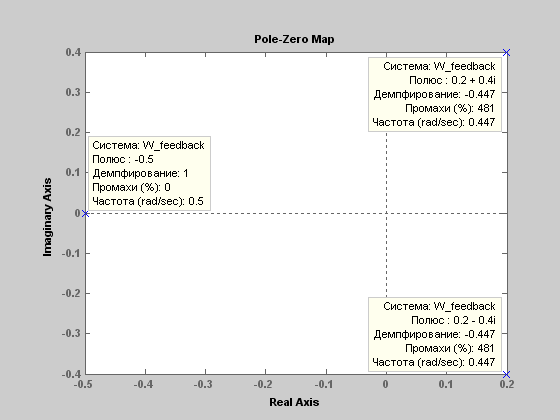
Очевидно, что нули передаточной функции ОУ находятся в точке (0; 0), что даёт незатухающие колебания при подаче на вход единичного ступенчатого воздействия.
Подберем оптимальный переходный процесс для этого звена:
Получение желаемой функции передачи.
|
Матрица состояния системы:
|
det (A - Eλ) = λ2 (-0.1 - λ) = 0. λ = 0, λ = 0, λ = -0.1
Предположим, λ* = -3, λ* = -2, λ* = -1, т.е. D(s) = (s+1)(s+2)(s+3) = s3 + s2 + 11s + 6; |

k1 = 0 – 6 = -6
k2 = 0 – 11 = -11
k3 = -0.1 – 1 = -1.1
![]()
Подключая данное звено коррекции в прямую цепь, получаем: