

КУРСОВОЙ ПРОЕКТ / Мой курсовик по ТУ
.docСанкт-Петербургский Государственный
Электротехнический Университет
Кафедра АиПУ
КУРСОВОЙ ПРОЕКТ по дисциплине «Теория управления»
СИНТЕЗ И ИССЛЕДОВАНИЕ СВОЙСТВ СИСТЕМЫ УПРАВЛЕНИЯ
Студент: гр. 9331
Лукашук В.Н.
Преподаватель
Пошехонов Л. Б.
Санкт-Петербург
2003
Задание
Структурная схема СУ
 Рис.1
Рис.1
Звено 1. Фильтр. Wi = 1 / (0.01s + 1).
Звено 2. Коррекция последовательного типа. Исходная ПФ W2 = 1 / 1.
Звено 3. Усилитель. W3 = 20.
Звено 4. Электрогидравлический преобразователь. W4 = 1.5 / (0.1s + 1).
Звено 5. Промежуточный сервомотор. W5 = 1 / s.
Звено 6. Сервомотор. W6 = 1 / (0.1s + 1).
Звено 7. Регулирующий клапан травления. W7 = 0.8 .
Звенья 8-10. Паровые объемы. W8 = 1 / (0.02s + 1); W9 = 1 / (s); W10 = -1.
Звено 11. Датчик давления пара. W11 = 0.8.
Звено 12. Обратная связь. W12 = -1 / 1.
Требования к системе
Перерегулирование < 15%.
Зона насыщения нелинейного элемента с = 1
Зона нечувствительности нелинейного элемента b = 0.08
Этап 1
-
По исходной информации из задания была составлена структурная схема СУ (см. файл 5_2.mdl или Рис.1)
-
Синтез установившихся движений в связи с характером исходных данных не выходит за рамки пункта 1.1.
-
Как результат анализа полученной исходной системы приведены следующие графики на Рис. 2:

Рис. 2
На данной стадии исследования наиболее наглядно и интересно расположение корней (см. Рис. 3):

Рис. 3
Численно корни имеют следующие значения:
s1 = -100
s2 = -49.03
s3,4 = -11,36 4.37j
s5,6 = 0.87 3.53j
5 и 6 корни находятся в правой полуплоскости, следовательно, система неустойчива, а, значит, необходим дальнейший синтез динамики.
1.4. «Частотный синтез».
А. Характеристики можно корректировать, двигаясь вдоль характеристики как слева направо, так и справа направо. В плане удобства и точности коррекции второй способ даже предпочтительнее – с его помощью и проводится исследование. Частотный синтез последовательного корректирующего устройства проводится в точках указанных в табл. 1:
Табл. 1
|
Наклон ЛАЧХ, дБ |
- 40 |
0 |
40 |
|
Частота, рад/с |
9,79 |
0,477 |
0,0225 |
|
Модуль, дБ |
- 19,9 |
4,97 |
58,9 |
|
Множитель |
|
|
|
В результате для последовательного
корректирующего устройства получили
следующую схему (см. Рис. 4):
результате для последовательного
корректирующего устройства получили
следующую схему (см. Рис. 4):
Рис. 4

рис. 5
рис.6

Таким образом
для корректирующего звена
![]()
На Рис. 5 приведены характеристики системы до и после введения корректирующего звена. Видно, что после проведения коррекции выполнены условия совпадения исходной и желаемой ЛАЧХ на низких и высоких частотах; частота среза и частота «пи» сдвинулись таким образом, что теперь частота среза меньше частота «пи». А значит система устойчива. На Рис. 6 приведен переходный процесс скорректированной системы. Перерегулирование составляет 14,5%, что удовлетворяет поставленным условиям.
Б. Для частотного синтеза корректирующего устройства типа местной обратной связи, обхватим обратной связью звено обладающее наибольшей инерцией. При данных условиях это звено 3 (W3 = 20). Коррекция исходной ЛАЧХ проводится в точках указанных в Табл. 2:
Табл. 2
|
Наклон ЛАЧХ, дБ |
- 40 |
0 |
40 |
|
Частота, рад/с |
9,79 |
0,477 |
0,0225 |
|
Модуль, дБ |
- 19,9 |
4,97 |
58,9 |
|
Множитель |
|
|
|
В результате для коррекции типа местной
обратной связи получили следующую схему
(см. Рис. 7):
результате для коррекции типа местной
обратной связи получили следующую схему
(см. Рис. 7):
Рис. 7
Рис. 8

Рис. 9

Таким образом для
корректирующего звена
![]()
На Рис. 8 приведены характеристики системы до и после введения корректирующего звена. Видно, что после проведения коррекции выполнены условия совпадения исходной и желаемой ЛАЧХ на низких и высоких частотах; частота среза и частота «пи» сдвинулись таким образом, что теперь частота среза меньше частота «пи». А значит система устойчива. На Рис. 9 приведен переходный процесс скорректированной системы. Перерегулирование составляет 14,5%, что удовлетворяет поставленным условиям.
1.5. Параметрическая оптимизация. Необходимо провести оптимизацию полученных в предыдущем пункте корректирующих устройств с целью повышения качества динамики, а также с целью упрощения коррекции до 1-го или 2-го порядка.
При рассмотрении систем как с последовательным корректирующим устройством, так и с коррекцией типа обратной связи было установлено, что выбранные в пункте 1.4 корректирующие устройства и являются оптимальными. При проведении оптимизации при различных значениях весового коэффициента, измененная переходная функция либо не удовлетворяла заданному требованию по перерегулированию, либо не давала никакого повышения качества динамики.
-
Сравнивая все полученные в предыдущих пунктах варианты СУ, выбираем за окончательный – «базовый» - вариант линейной СУ с корректирующим звеном типа местной обратной связи :
![]()
Это связано с тем, что при прочих равных характеристиках, ее физическая реализация проще и удобней.
Этап 3
-
В канал управления СУ ввести импульсный элемент с фиксатором 0-го порядка (Рис. 10).
 Рис.
10
Рис.
10
Определить значение периода квантования Т0 при котором начинаются отличия в поведении непрерывной и дискретной СУ, и при котором отличие в поведении становится недопустимым.
В качестве разомкнутой СУ используется базовый вариант (Рис.10 – «In1 Out1»).
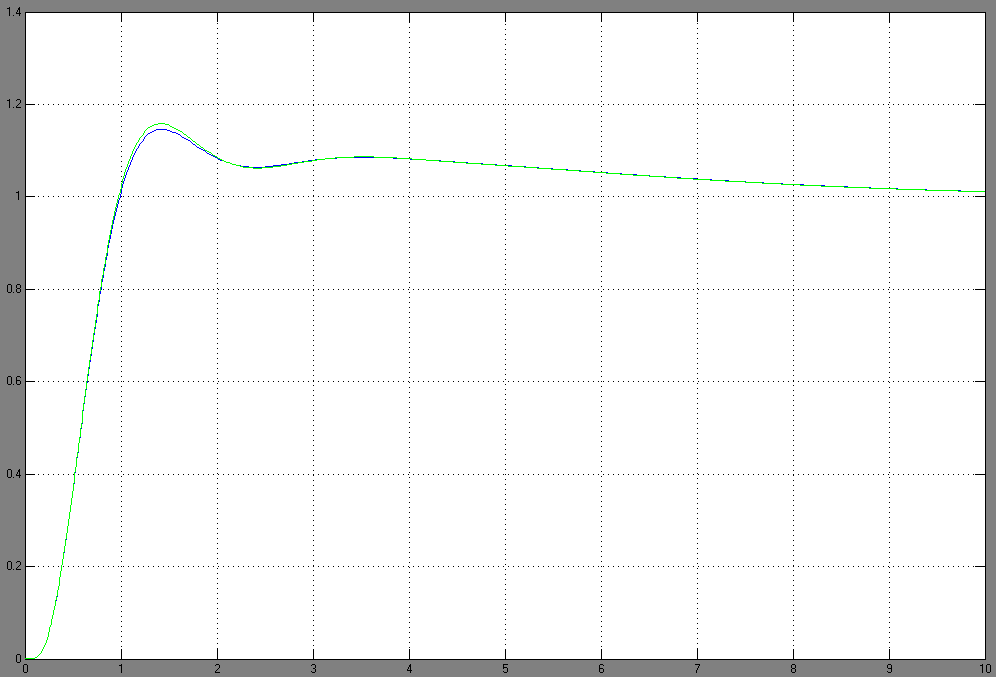
Рис. 11
Из Рис. 11 видно, что, начиная с Т0 = , начинают становиться недопустимыми отличия в поведении непрерывной и дискретной СУ.
Этап 4
В базовый вариант СУ вводится нелинейный элемент (Рис. 12). Нелинейный элемент типа «зона нечувствительности с насыщением».
 Рис.
12
Рис.
12
Проведем исследование влияния нелинейных элементов на процессы при разных уровнях входного воздействия; сопоставим с процессами в линейной модели.

Рис. 13
Из Рис. 13 видно, что при входном воздействии 0,1 нелинейная СУ значительно отличается от линейной, что связано с последствиями действия зоны нечувствительности.

Рис. 14
На Рис. 14 видно, что уже при входном воздействии 0,2 нелинейная СУ совершает качественный скачок в сравнении с ситуацией отображенной на Рис. 13. Переходная характеристика уже в значительной мере избавилась от последствий влияния зоны нечувствительности, но еще не вступила в зону насыщения.

Рис. 15
Начиная с входного воздействия 0,5 проявляется сильное влияние насыщения на нелинейную СУ. На Рис. 16 приведена переходная характеристика при входном воздействии 0,8. До этого значения влияние насыщения усиливается заметно, а после лишь незначительно.
Заключение
В результате проделанной работы по курсовому проектированию, была синтезирована и исследована электрогидравлическая система регулирования давления пара судового турбогенератора. Так, после составления структурной схемы СУ, был проведен частотный синтез последовательного корректирующего устройства и коррекции типа местной обратной связи. Затем была проведена параметрическая оптимизация, но в моем случае она не дала более оптимального варианта, что говорит об удачности и точности проведения частотного синтеза. За базовый вариант была принята коррекция типа местной обратной связи, так как ее физическая реализация проще. Все перечисленные этапы выполнялись в программе Classic.
Далее используя программное средство Simulink пакета Matlab, в канал управления СУ был введен импульсный элемент с фиксатором нулевого порядка. Было определено значение периода квантования Т0, при котором начинаются отличия в поведении непрерывной и дискретной СУ, и при котором отличие в поведении становится недопустимым. Затем в базовый вариант СУ мы ввели нелинейный элемент типа «зона нечувствительности с насыщением », и исследовали влияние нелинейных элементов на процессы при разных уровнях входного воздействия.