

7. Анализ чувствительности скорректированной системы.
Для проведения анализа чувствительности
скорректированной системы приведем
таблицу (см. табл. 1.) с такими параметрами,
как
![]() -
коэффициент усиления нестабильного
звена (УМ),
-
коэффициент усиления нестабильного
звена (УМ),![]() - время регулирования иM– показатель колебательности, и
попытаемся скорректировать последние
два показателя по критериям, указанным
в задании, варьируя
- время регулирования иM– показатель колебательности, и
попытаемся скорректировать последние
два показателя по критериям, указанным
в задании, варьируя![]() .Mдолжно быть меньше 1.3, а
.Mдолжно быть меньше 1.3, а![]() минимально из набора всех полученных.
минимально из набора всех полученных.
|
|
|
|
|
10 |
1.86 |
4.45 |
|
20 |
1.02 |
3.66 |
|
40 |
0.50 |
2.70 |
|
80 |
0.31 |
1.72 |
|
90 |
0.19 |
1.55 |
|
100 |
0.15 |
1.09 |
|
110 |
0.16 |
1.25 |
|
150 |
0.21 |
1.62 |
Табл.1. Анализ чувствительности скорректированной системы.
Из данной выборки лучшими значениями оказались время регулирования, равное 0.15 сек. и показатель колебательности, равный 1.09 при коэффициенте усиления УМ, равном 100.
8. Анализ нелинейной системы.
С помощью пакета MATLAB/Simulink введем модель системы в ЭВМ. Получим следующую схему:

Рис. 12. Схема откорректированной системы, полученная путем моделирования на MatLab/Simulink.
После моделирования процесса в MATLAB/Simulink видно, что результаты (см. рис. 13) совпадают с результатами, полученными при помощи программы CLASSIC (см. рис. 10).

Рис.13. График переходного процесса откорректированной системы, полученный путем моделирования на MatLab/Simulink.
Введем в систему нелинейный элемент (НЭ):
- люфт с ограничением на выходе двигателя(deadzone).
Получим следующую схему:

Рис. 14. Схема откорректированной системы с НЭ, полученная путем моделирования на MatLab/Simulink.
Изменяя параметры НЭ, определим граничные значения параметров, при которых в системе возникает неустойчивость (см. табл. 2), и приведем графики на выходе НЭ и переходного процесса под его воздействием:
|
Люфт |
|
|
|
±0 |
0.15 |
52.86 |
|
±10 |
0.15 |
45.04 |
|
±20 |
0.15 |
38.17 |
|
±30 |
0.29 |
31.23 |
|
±40 |
0.38 |
24.72 |
|
±80 |
- |
4.93 |
Табл. 2. Анализ устойчивости системы с НЭ.
Анализ таблицы 2 и рисунков 16 – 21 показывает, что система остается устойчивой при любом изменении параметров люфта в диапазоне от ±0 до ±100.

Рис.16. График переходного процесса на выходе звена коррекции с ограничением, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±80.

Рис.17. График переходного процесса на выходе системы, полученный путем моделирования на MatLab/Simulink. Процесс устойчивый, граничные параметры люфта равны ±80, перерегулирование равно 4.93.
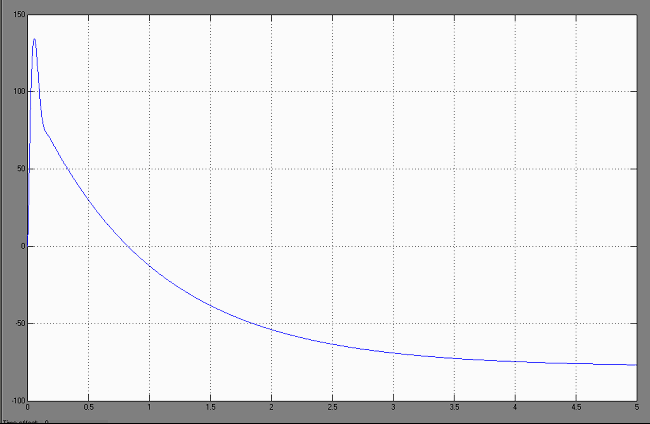
Рис.18. График переходного процесса перед входом в люфт, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±80.

Рис.19. График переходного процесса на выходе звена коррекции с ограничением, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±40.

Рис.20. График переходного процесса на выходе системы, полученный путем моделирования на MatLab/Simulink. Процесс устойчивый, граничные параметры люфта равны ±40, время регулирования равно 0.38, перерегулирование равно 24.72.

Рис.21. График переходного процесса перед входом в люфт, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±40.

Рис.22. График переходного процесса на выходе звена коррекции с ограничением, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±0.

Рис.23. График переходного процесса на выходе системы, полученный путем моделирования на MatLab/Simulink. Процесс устойчивый, граничные параметры люфта равны ±0, время регулирования равно 0.15, перерегулирование равно 52.86.

Рис.24. График переходного процесса перед входом в люфт, полученный путем моделирования на MatLab/Simulink. Граничные параметры люфта равны ±0.