

Пожарная тактика / Matyushin - Primeneniye robototekhniki pri tushenii 2016
.pdfРис. 1. Роботизированная машина пожаротушения «Сойка»
В МЧС России была разработана и утверждена Программа создания и внедрения робототехнических средств для решения задач МЧС России на 1997–2000 годы (приказ МЧС России от 18 июня 1997 г. № 343), которая предусматривала первоочередное оснащение робототехническими средствами 294 ЦСООР. Приказом МЧС России от 4 декабря 2003 года № 719 указанная Программа была пролонгирована до 2010 года с учетом изменений и дополнений, отражающих потребности Министерства в оснащении РТС, в том числе противопожарными робототехническими комплексами.
Исследования, выполненные по реализации этой программы различными научными центрами и компаниями в области роботостроения, показали, что создание многоэлементной группировки мобильных роботов, действующих как единый взаимосвязанный комплекс, является одной из основных задач по разработке эффективной интеллектуальной безлюдной технологии, способной работать в боевых условиях, в том числе при ликвидации тяжелых ЧС. В соответствии с решением многофункциональных задач при проведении пожарно-спасательных операций была разработана система классификации мобильных противопожарных роботов, которая нашла отражение в проекте ГОСТ Р «Техника пожарная. Мобильные робототехнические комплексы для проведения аварийно-спасательных работ и пожаротушения. Классификация. Общие технические требования. Методы испытаний» [1].
В соответствии с положениями стандарта типаж МРТК-П устанавливает оптимальную по номенклатуре, параметрам и показателям совокупность типоразмерного ряда, что позволяет упорядочить процесс разработки и оптимизации тактики применения МРТК-П.
11
МРТК-П предназначены для проведения работ по пожаротушению и ликвидации последствий радиационных и химических аварий, а также предотвращению возможного взрыва.
МРТК-П относятся к наземным телеуправляемым средствам. Способ передачи сигналов телеуправления определяется поставленными задачами и условиями эксплуатации комплекса. Могут быть использованы следующие линии связи:
-радиоканал (Р);
-проводная (П);
-оптический канал (О);
-комбинированная (К).
Вкачестве транспортной базы могут быть использованы серийные или специально спроектированные шасси, которые по типу движителя делятся на следующие:
- гусеничные (Г); - колесные (К);
- комбинированные (Км); - шагающие (Ш).
Тип привода определяется функциональным назначением и параметрами МРТК-П и может быть:
- механическим по схеме двигатель внутреннего сгорания (далее – ДВС) – механическая трансмиссия (М);
- гидромеханическим по схеме ДВС – гидропривод (ГМ); - электромеханическим по схеме ДВС – электрогенератор – аккумуля-
тор – электродвигатель (ЭМ); - электрическим по схеме аккумулятор – электродвигатель (Э).
По степени функциональности МРТК-П классифицируются: - многофункциональные (универсальные);
- монофункциональные (специализированные), которые должны решать одну или несколько задач.
Взависимости от функционального назначения МРТК-П могут быть оснащены средствами пожаротушения, манипулятором с инструментом (со сменным схватом), навесным инженерным оборудованием, средствами наблюдениями и радиационно-химического мониторинга. Обязательным условием комплектации МРТК-П является наличие средств тепловой защиты
вусловиях пожара.
Вкачестве средств пожаротушения на МРТК-П в зависимости от их подкласса и типа применяются модульные (М) или стационарные (С) системы. Модульные системы являются возимыми устройствами, установленными непосредственно на шасси робота, в состав которых входит оборудование
12
для хранения и подачи огнетушащего вещества в очаг пожара. Стационарные системы представляют собой устройства хранения и транспортировки огнетушащего вещества, находящиеся в безопасном месте, и устройства для подачи огнетушащего состава в очаг пожара, установленные непосредственно на шасси робота.
Взависимости от огнетушащего вещества системы пожаротушения классифицируются следующим образом:
- водопенные (ВП); - порошковые (П); - газовые (Г);
- газоаэрозольные (ГА); - комбинированные (К).
Внастоящее время во всем мире активно ведутся работы по созданию РТС, предназначенных для выполнения действий по ликвидации тяжелых техногенных аварий в условиях особой опасности. Актуальность создания мобильной противопожарной техники подтверждается многочисленными иностранными разработками. За рубежом ведутся интенсивные исследования по применению роботов для экстремальных сред, пожарных и спасательных роботов. Увеличивается количество публикаций и патентов в области пожарной робототехники. Ведущие страны-разработчики в данной области – Япония, США, Великобритания, Франция, ФРГ, Швеция.
Для проведения пожарно-спасательных операций в помещениях и в условиях ограниченного пространства и высокого риска используются РТС легкого класса. Их применение позволяет вести эффективную борьбу с огнем
внепосредственной близости от источника возгорания даже вне пределов прямой видимости. Данные роботы способны функционировать в сложных условиях окружающей обстановки, таких как высокие температуры, ядовитые среды или пожаровозрывоопасные здания и сооружения. Использование противопожарных роботов легкого класса позволяет пожарным осуществлять пожаротушение в ограниченных пространствах, на узких улицах, промышленных объектах, складах, туннелях, аэропортах, военных объектах, энергетических объектах, химических производствах и т. д.
Кроме того, эти противопожарные роботы легко транспортируются на специально приспособленном транспорте или трейлере, что обеспечивает пожарным преимущество для быстрого начала пожаротушения. Опционально возможно оснащение робота датчиками наличия химических или биологических агентов, радиации и другими датчиками.
Примером подобной техники является немецкий робот Firerob (Рис. 2). Характерной особенностью противопожарных РТС, в отличие от аварийноспасательных и антитеррористических роботов, является возможность рабо-
13
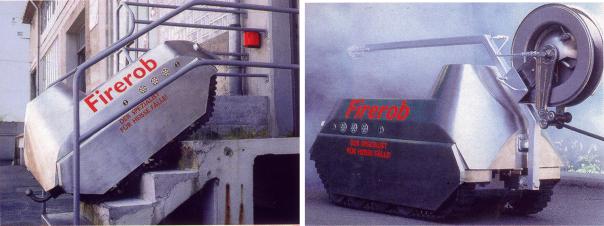
ты при повышенных температурах в условиях пожара. Это требование обусловливает необходимость наличия тепловой защиты или устойчивости оборудования к воздействию высоких температур. В качестве тепловой защиты на роботе Firerob используется металлический тепловой экран, поверхность которого изнутри орошается водой, подаваемой по рукавной линии от внешнего водоисточника. В качестве оборудования пожаротушения на роботе смонтирована установка пожаротушения тонкораспыленной водой. Управление роботом может осуществляться по радиоканалу и по кабелю.
Рис. 2. Противопожарный робот Firerob (Германия)
Робот-пожарный FFR-1 (Рис. 3), разработанный компанией InRob (Израиль), представляет собой дистанционно управляемое по беспроводному каналу РТС, приводимое в движение электродвигателями, оснащен двумя видеокамерами, передающими изображение на монитор устройства дистанционного управления. Робот приводится в движение двумя электромеханическими приводами, конструктивно связанными с металлическими гусеницами, смонтированными на торсионной подвеске. Для гусениц предусмотрена возможность их оснащения резиновыми накладками. Питание электродвигателей обеспечивается аккумуляторными батареями. Управление роботом осуществляется по радиоканалу на расстоянии до 260 м и по кабельному каналу на расстоянии до 100 м. Для видеонаблюдения и управления роботом используются бортовая фронтальная и подвижная, закрепленная на мачте, обзорная камера. Обзорная камера поддерживает режим дистанционного управления фокусом и зумом. Угол обзора камеры по горизонтали ±175º, по вертикали ±45º. Каждая из камер оснащена системой подсветки. В качестве оборудования пожаротушения используется дистанционно управляемый с электрическим приводом лафетный ствол, обеспечивающий расход воды до 70 л/с при давлении 15 атм. Робот способен тащить за собой пожарный рукав диаметром 77 мм и охлаждающий рукав диаметром 22 дюйма длиной до 100 м. Тепловая защита с помощью орошения обеспечивает возможность
14

длительной работы при температуре до 400 °С и кратковременном воздействии до 1000 °С. Время работы робота на одном заряде батарей – до 3 ч.
Технические характеристики FFR-1 |
|
Длина, см ........................................................................... |
162 |
Ширина, см........................................................................ |
114 |
Высота, см.......................................................................... |
138 |
Вес, кг................................................................................. |
940 |
Скорость, км/ч, макс.......................................................... |
3,8 |
Угол наклона преодолеваемого препятствия, макс......... |
35º |
Угол наклона преодолеваемых ступеней, макс............... |
32º |
Глубина преодолеваемого |
|
водного препятствия, см, макс. ........................................ |
20 |
Высота преодолеваемого препятствия, см, макс............. |
20 |
Рис. 3. Дистанционно управляемый робот-пожарный FFR-1, разработанный компанией InRob (Израиль)
Противопожарный гусеничный робот RoboFire-1, выпускаемый турецкой компанией Robotica (рис. 4) при участии немецких специалистов, представляет собой также роботизированный комплекс легкого класса.
Передвижение робота осуществляется с помощью электрического двигателя. Принцип питания – сухие перезаряжаемые аккумуляторы. Робот способен преодолевать бездорожье, подниматься по лестничным маршам с уклоном до 35°. Максимальная скорость передвижения робота по ровной поверхности – 6 км/ч. Направление движения и скорость робота задаются оператором дистанционного пульта по получаемому изображению от двух видеокамер, расположенных по центру робота спереди и сзади. Для управления в темноте или в условиях сильной задымленности робот имеет светодиодные прожекторы, расположенные попарно спереди и сзади. Камеры также могут
15

работать в инфракрасном диапазоне. Сверху на корпусе робота расположен дистанционно управляемый лафетный ствол, имеющий электроприводы. Управление пожарным стволом осуществляет оператор при помощи дистанционного пульта, ствол имеет возможность поворачиваться вокруг вертикальной оси на угол до 360°, вокруг горизонтальной оси – до 90° от горизонта. Пожарный ствол имеет соосную видеокамеру, позволяющую оператору дистанционного пульта контролировать обстановку во всех направлениях, осуществлять разведку внутри помещений, вести поиск пострадавших, а также координировать направление водяной струи и процесс тушения очагов возгорания. Подача воды для тушения пожара осуществляется от внешнего источника по пожарным рукавам. Для подсоединения пожарных рукавов на корпусе робота с задней стороны имеется присоединительный штуцер внешним диаметром 63 мм. Через него подается вода к бортовому пожарному насосу, установленному на борту робота, который обеспечивает подачу воды на ствол производительностью от 7 до 37 л/с при максимальном давлении 16 атм. Пожарный ствол может работать как в режиме компактной струи, так и в режиме распыленной струи. При работе в режиме распыления обеспечивается дополнительная термозащита корпуса робота водяным туманом. Корпус изготовлен из нержавеющей стали и имеет водо- и термозащиту. Внутренняя теплозащита изготовлена из многослойных полимерных материалов, имеющих теплостойкость свыше 900 °С. Конструкция робота выдерживает нагрев до 400 °С, кратковременно – до 600 °С. Изделие может тащить за собой до 200 м наполненных рукавов по ровной поверхности.
Рис. 4. Противопожарный робот RoboFire-1, выпускаемый турецкой компанией Robotica
Для ведения пожарно-спасательных операций и разведки в условиях повышенной опасности и в ограниченном пространстве в России НИИ специального машиностроения МГТУ им. Н.Э. Баумана и ФГУ ВНИИПО МЧС
16
России разработали мобильный роботизированный комплекс разведки и пожаротушения МРК-РП (Рис. 5). Визуальная разведка внутри помещений и на участках местности ведется с помощью телевизионной системы, включающей 5 телевизионных камер, одна из которых работает в ИК диапазоне. С помощью ИК камеры осуществляется не только управление в условиях плохой видимости, но и производится поиск скрытых очагов возгорания. Для проведения химической и радиационной разведки робот оснащается соответствующими приборами, информация от которых поступает на пульт оператора (Рис. 6). Дальность управления роботом по радиоканалу в условиях прямой видимости – до 1000 м, по кабельному каналу – до 100 м.
Для выполнения транспортных и технологических операций при тушении пожаров и ликвидации аварий на роботе установлен манипулятор, позволяющий поднимать груз до 120 кг на минимальном выносе руки и 30 кг на максимальном вносе руки. Конструкция последнего звена манипулятора оснащена механизмом ротации, что позволяет осуществлять вращательные движения, например, при вращении вентилей. На манипуляторе также устанавливаются сменные устройства подачи огнетушащих веществ:
-тонкораспыленной воды;
-пены низкой кратности;
-пены средней кратности;
-порошка.
Контроль за направлением подачи огнетушащих веществ и работой схвата-манипулятора осуществляется с помощью одной из видеокамер, установленной непосредственно на манипуляторе.
Подача воды и раствора пенообразователя для тушения тонкораспыленной водой и низкократной пеной (Рис. 7) может осуществляться от внешнего источника – мотопомпы высокого давления, установленной на машине технической поддержки АБР-Робот (Рис. 8), по рукаву высокого давления длиной до 100 м или из навесного закачного бака вместимостью 50 л огнетушащего вещества. Из аналогичного бака осуществляется подача огнетушащего порошка. Подача указанных огнетушащих веществ осуществляется под давлением 20–25 атм, при этом производительность составляет 1 кг/с. Подача раствора пенообразователя на пеногенератор средней кратности производится по рукавной линии от обычного пожарного автомобиля (Рис. 9). Дальность подачи компактной струи воды составляет 15 м, компактной струи пены низкой кратности – 10 м, распыленной струи воды – 5 м, пены средней кратности – 5 м, порошка – 6 м. Полная снаряженная масса МРК-РП в зависимости от выполняемых операций составляет 230–360 кг.
17

Для тепловой защиты используется водяной экран, создаваемый специальной форсункой (Рис. 10). Конструкция робота выдерживает нагрев до 150 °С, при наличии охлаждения – до 250 °С, кратковременно – до 400 °С.
Движение робота обеспечивается за счет гусеничного движителя, приводимого в действие двумя электродвигателями. Максимальная скорость передвижения – 3,6 км/ч. Конструкция движителя робота позволяет преодолевать вертикальные препятствия высотой 300 мм, передвигаться по лестничным маршам по углом до 35°, при этом за счет изменения конфигурации гусеничного движителя длина робота может меняться от 950 до 1300 мм при ширине 700 мм и высоте 800 мм. Максимальное время автономной работы робота составляет 4 ч.
Рис. 5. Общий вид робота МРК-РП
18

Рис. 6. Общий вид унифицированного пульта управления РТС
Рис. 7. Общий вид АБР-Робот и МРК-РП
19

Рис. 8. Тушение очага пожара роботом МРК-РП с помощью пены низкой кратности
Рис. 9. Подача пены средней кратности роботом МРК-РП
20