

Принципиальная схема регулятора
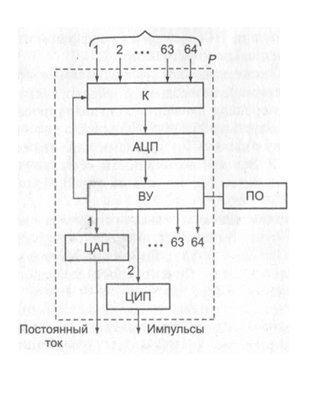
Рис.8. Структурная схема регулятора «Ремиконт-130»
10. Оценка качества регулирования
1.Статическая ошибка ∆стат — это разность значений регулируемого параметра в состояниях исходного и конечного (после окончания процесса регулирования) равновесия системы.
Определяем статическую ошибку ∆ста = 10
Определяем по рис.1 статическую ошибку ( по графику в относительных единицах)
2. Динамическая ошибка ∆дин — это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия.
Определяем динамическую ошибку по(рис.1) ∆дин =45
3. Время регулирования τ — это отрезок времени с момента подачи в замкнутую САУ возмущающего воздействия до момента, по истечении которого регулируемый параметр в состоянии конечного равновесия или отличается от заданного значения не более чем на ±5 %. Если заданное значение равно нулю, то ±5 % берется от значения динамической ошибки.
Определяем время регулирование по(рис.1) t р= 480 с
Заключение
В ходе выполнения курсового проекта исследовали заданную систему – регулирование расхода в трубопроводе
- построили кривую разгона, определили динамические параметры и получили передаточную функцию объекта регулирования;
- составили структурную схему САР результате получили передаточную функцию САР;
- выбрали тип переходного процесса и регулятор для данного переходного процесса;
- рассчитали оптимальные настройки ПИ-регулятора, обеспечивающие заданный запас устойчивости и качество переходных процессов;
- выбрали регулятор типа «Ремиконт Р-130»
- определили качество полученного процесса регулирования;
Данный регулятор «Ремиконт Р-130» обеспечивает качество регулирования расхода в трубопроводе горячего водоснабжения предприятия.
Используемая литература: Основная:
Петрова, А.М. Автоматическое управление : учебное пособие /А. М. Петрова – М. : ФОРУМ, 2010. – 240 с. : ил – (Профессиональное образование)
Гальперин, М.В. Автоматическое управление: учебник. – М. : ИД «ФОРУМ»: ИФРА-М, 2007. – 224 с. : ил. – (Профессиональное образование).
Шишмарев, В.Ю. Автоматика [Текст]: учебник для спо / В.Ю. Шишмарев. – 2 –е изд. – М. : Академия, 2008. – 288 с. : ил.
Александровская, А.Н. Автоматика: учебник для студ. учреждений средн. проф. образования / А.Н. Александровская. – М. : «Издательский центр «Академия», 2011. – 256 с.