

Выбор регулятора и его обоснование для характерного переходного процесса регулирования
Выбор типа регулятора или закона регулирования для объекта управления определяется несколькими факторами:
5.1.Отношение общего времени его запаздывание к постоянной времени –τ/T;
5.2. Требованиями к качеству регулирования;
5.3. Видом передаточной функции объекта;
Определяю критерий выбора регулятора по роду действия τ/T
τ/T=48/210=0.2285
где: τ = 48 с
Выбираю регулятор по критерию τ/T
Я выбираю ПИ- регулятор который применяется в объектах:
-с любой ёмкостью;
-с большим запаздыванием
-при большой, но медленно меняющейся нагрузки
-для много ёмкостных объектов эти регуляторы применяются при
τзап.>0,1T
τзап.>0,1×210
48>21
Для обеспечения требуемого качества регулирования параметров, необходимо определить оптимальный процесс регулирования для характерного переходного процесса, подобрать настройки регулятора.
Выбираю пропорционально-интегральный регулятор (ПИ регулятор).
Это один из наиболее часто используемых в промышленных САУ типов регуляторов.
Его передаточная функция следующая:

6. Составление структурной схемы аср
Составляю структурную схему САР регулируемого параметра
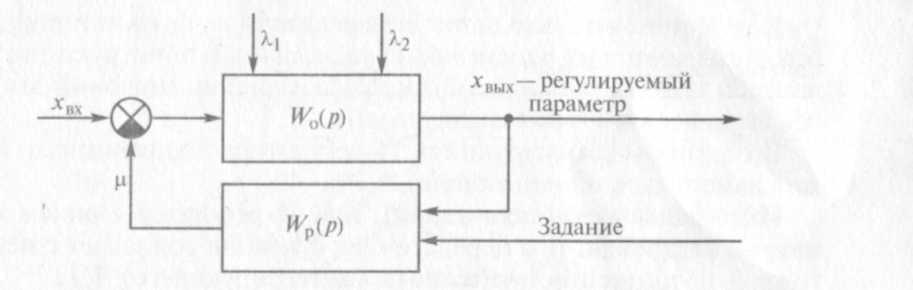
Рис.3.Структурная схема САР
где:
W(р)= -
передаточная функция
-
передаточная функция
W(р)=1.8
7.Определение дополнительных параметров для выбранного регулятора
7.1.Определяю дополнительные параметры
Уточняю по кривым, показанным на рис.4, значение RД - динамическое отклонение регулируемого параметра, которое должно быть меньше расчетного.

Рис.4.Кривые выбора регулятора для апериадического переходного процесса
RД= 0,5 - динамическое отклонение регулируемого параметра
7.2. Определяем относительное время регулирования для выбранного процесса
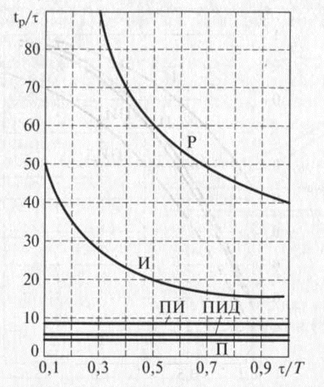
Рис.5. График времени регулирования для апериодического процесса

 =48c
=48c
 =48×10=480c
=48×10=480c
7.3. Определяем остаточное отклонение регулируемой величины (расход) σʹст по графику
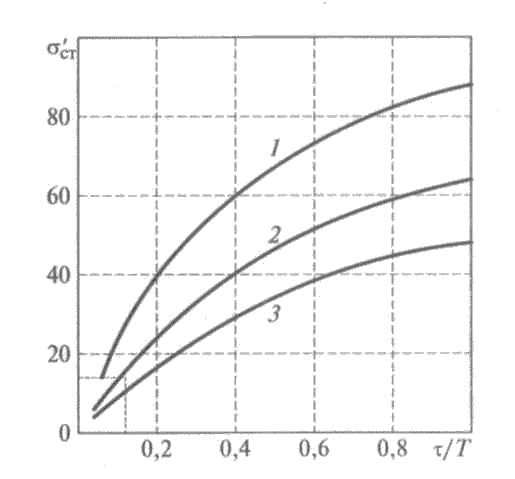
Рис.6. График остаточного отклонения регулируемой величины:
σʹст = 42%
7.4. По форме переходного процесса определяем максимальное динамического отклонение регулируемой величины - расход по формуле:
∆σ = RД * λ*k
∆σ
= 0.5* 25% * 1,8 /
% х.р.о. = 22.5
/
% х.р.о. = 22.5
7.5. Проверяем время регулирования по допустимой статической ошибке σст по формуле:
σст= σʹст* λ *k
σст = (42%* 25%х.р.о.*1,8 / %х.р.о.) /100 = 18.9
По технологическим требованиям, считают полученное значение σст допустимым.
7.6. Привожу характеристику выбранного регулятора типа ПИ
Характер действия : Перемещение регулирующего органа пропорционально сумме отклонения и интеграла отклонения регулируемой величины по времени
Закон регулирования:
м = kp (∆σ + 1/tu∫ ∆σ dt)
Параметры настройки: kp, tu
8.Определяю оптимальные значения параметров настройки выбранного регулятора
Исходные данные:
k = 1.8
τ = 48 c
Т = 210с
1.Определяю коэффициент регулирования :
Kp= 0,7/ k × τ/Т
Где: Кр- это коэффициент регулирования
Kp= 0,7/1.8× 48/ 210=0.1
2. Определяю время изодрома:
Тиз = τ + 0,3 Т
Тиз = 48 + 0,3 × 210 = 111с