

1.2.4.Астатическое регулирование
Мы рассмотрели систему, в которой выходная величина при изменении возмущающего воздействия изменяется. Возможны ли автоматические системы регулирования, в которых бы в установившемся режиме работы выходная величина не зависела от возмущающего воздействия? Оказывается, такие системы есть.
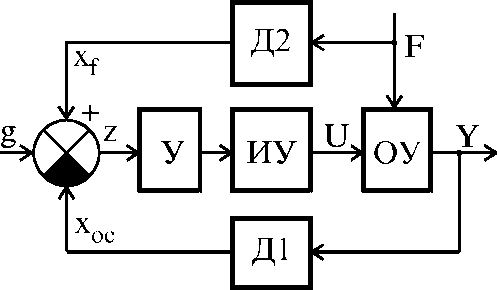
Рис. 1.10 – Функциональная схема системы |
В этих системах отсутствует пропорциональная связь в установившемся режиме работы между управляющим воздействием и величиной отклонения. Включим в систему устройство, у которого выходная величина связана с входной следующей зависимостью:
|
|
|
Рис. 1.11 – Изменение координат системы |
Увеличение вызывает уменьшение выходной величины и увеличение отклонения , что приводит к увеличению управляющего воздействия и, следовательно, к увеличению выходной величины. Здесь
«ИНТ»- интегрирующее устройство.
Представим, как могут изменяться
координаты системы:
В рассматриваемой системе установившийся режим работы возможен лишь в том случае, когда величина отклонения равна нулю. Только в этом случае выходная координата интегрирующего устройства не будет изменяться. Нагрузочная характеристика системы будет иметь вид прямой, параллельной оси возмущающего воздействия. Системы, в которых установившееся значение выходной величины не зависит от возмущающего воздействия, называются астатическими. Регулирование называется астатическим. Регулятор и объект называются астатическими, если они обладают способностью интегрировать входной сигнал. |
||


1.2.5.Комбинированные системы автоматического управления
Рис. 1.12 – Функциональная схема комбинированной САР |
Комбинированные системы автоматического регулирования представляют совокупность двух систем: САР по отклонению и САР по возмущению. В такой системе сигнал на входе усилителя равен
|
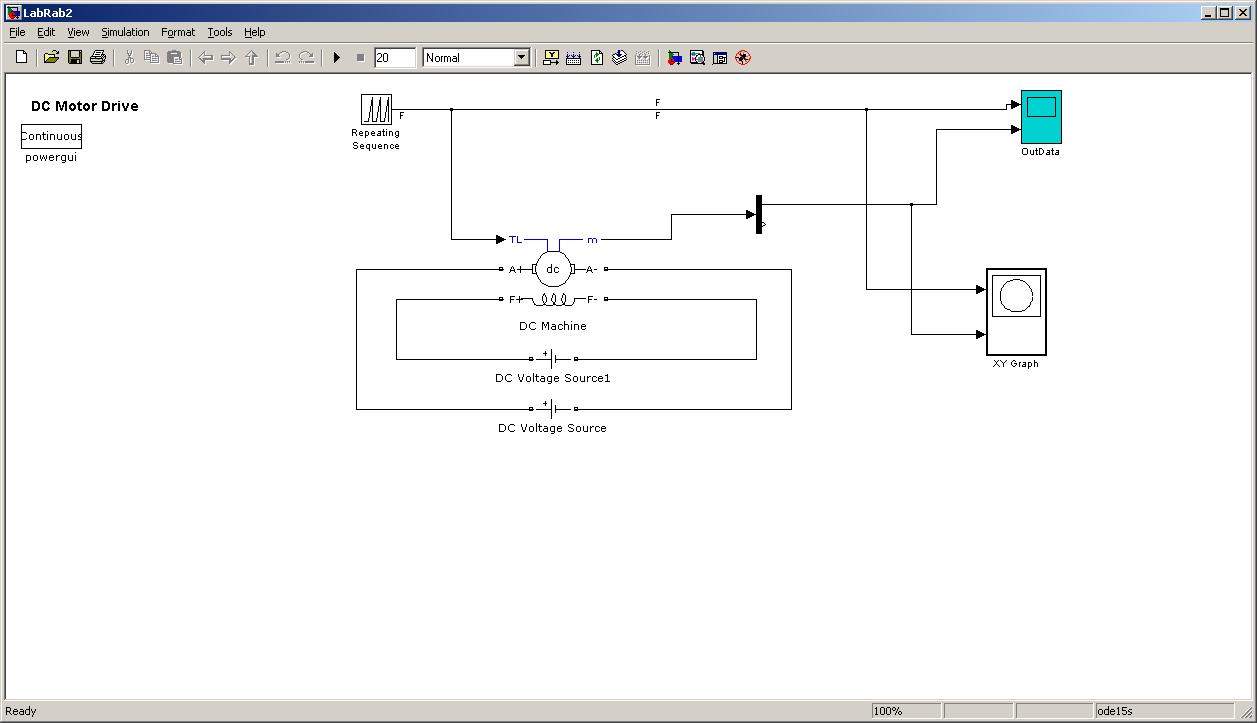
2.Лабораторная работа №1. Ознакомление с программой моделирования MatLab/Simulink.
Цель работы: получить практические навыки составления моделей электромеханических и мехатронных систем в среде программного пакета MatLAB/Simulink.
Программа работы (все варианты):
Ознакомиться с программным пакетом MatLAB/Simulink
Открыть файл Labrab1.mdl.
Добавить недостающие связи и элементы.
Оформить отчёт.

Исходная модель:

Конечная модель:
Варианты:
|
Напряжение DC Voltage Source, В |
Напряжение DC Voltage Source1, В |
Вариант DC Machine (параметр Preset model) |
1 |
240 |
100 |
2 |
2 |
220 |
120 |
3 |
3 |
200 |
140 |
4 |
4 |
180 |
160 |
5 |
5 |
200 |
180 |
6 |
6 |
160 |
140 |
7 |
7 |
100 |
120 |
8 |
8 |
200 |
100 |
9 |
9 |
120 |
120 |
10 |
10 |
180 |
240 |
11 |