ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ |
Государственное образовательное учреждение высшего профессионального образования |
Московский государственный технологический университет "СТАНКИН" |
УЧЕБНО-МЕТОДИЧЕСКОЕ УПРАВЛЕНИЕ |
Утверждено на заседании кафедры «КСУ»
"____"_____________ 200___ г.
Заведующий кафедрой ____________________ д.т.н., доц. Г.М. Мартинов
Ученый секретарь кафедры ____________________ к.т.н., доц. И.С. Кабак
Методические указания к лабораторным работам по курсу |
|
|
|
«Электромеханические и мехатронные системы»
|
|
|
|
Специальность |
220301.65 (210200) «Автоматизация технологических процессов и производств (в машиностроении)»
|
|
|
Цикл дисциплин учебного плана |
Учебный план по направлению 657900 «Автоматизированные технологии и производства», специальности 210200 «Автоматизация технологических процессов и производств» (2002 г) |
|
|
Квалификация дипломированных специалистов |
Инженер |
Методические указания составил:
Преподаватель Любимов а. Б. - кафедра «Компьютерные системы управления»
МОСКВА 2009 г.
1. Краткие теоретические сведения 3
1.1. Электрический двигатель постоянного тока 3
1.2. Основные принципы регулирования 3
1.2.1. Разомкнутые системы автоматического регулирования 3
1.2.2. Системы автоматического управления по возмущению (системы компенсации) 4
1.2.3. Замкнутые системы автоматического регулирования 5
1.2.4. Астатическое регулирование 6
1.2.5. Комбинированные системы автоматического управления 7
2. Лабораторная работа №1. Ознакомление с программой моделирования MatLAB/Simulink. 7
3. Лабораторная работа №2. Моделирование исполнительного электродвигателя. 9
4. Лабораторная работа №3. Моделирование одноконтурной системы автоматического управления. 10
5. Лабораторная работа №4. Моделирование двухконтурной системы автоматического управления. 15
6. Литература: 22
1.Краткие теоретические сведения
1.1.Электрический двигатель постоянного тока
Рис. 1.1 – Двигатель постоянного тока |
В таком двигателе
управление скоростью вращения вала
может производиться со стороны питания
цепи якоря или обмотки возбуждения.
Управляемой координатой для двигателя
обычно служит угол поворота вала
|
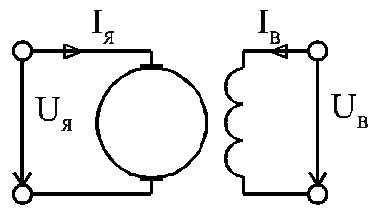
Под внешним воздействием понимают силы, действующие на вал двигателя, обусловленные трением и механическим сопротивлением (нагрузкой) приводимого в движение механизма.
Если управляющим воздействием является
напряжение питания якоря
![]() ,
то по величине тока якоря можно судить
о нагрузке на валу. Ток якоря
,
то по величине тока якоря можно судить
о нагрузке на валу. Ток якоря
![]() можно считать контролируемой величиной.
Под неконтролируемыми воздействиями
на двигатель понимают изменения
параметров двигателя, обусловленные
нагревом, износом, смещением щеток и
т.д.
можно считать контролируемой величиной.
Под неконтролируемыми воздействиями
на двигатель понимают изменения
параметров двигателя, обусловленные
нагревом, износом, смещением щеток и
т.д.
Процессы в двигателе могут быть описаны системой дифференциальных уравнений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Здесь
![]() - момент инерции механизма, приведенный
к оси двигателя;
- момент инерции механизма, приведенный
к оси двигателя;
![]() и
и
![]() - моменты трения и нагрузки на валу
двигателя.
- моменты трения и нагрузки на валу
двигателя.
При управлении со стороны якоря
характеристика управления
![]() носит монотонный характер и с ростом
напряжения питания якоря скорость
вращения вала растет.
носит монотонный характер и с ростом
напряжения питания якоря скорость
вращения вала растет.
1.2.Основные принципы регулирования
При изображении систем управления применяют два принципа - функциональный и структурный принцип и соответственно схемы подразделяются на функциональные и структурные схемы. Математические модели Simulink также представляют собой структурные схемы, поэтому описание модели и САР однотипны, что существенно облегчает понимание процессов функционирования САР.
1.2.1.Разомкнутые системы автоматического регулирования
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.
Рис. 1.2 – Функциональная схема разомкнутой САР |
Разомкнутые системы применяются для стабилизации и программного управления. Здесь
ЗУ - задающее устройство; У - усилитель;
ИУ - исполнительное устройство;
|
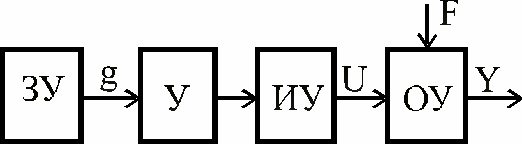
Задающее устройство вырабатывает задающее воздействие , в соответствии, с которым устанавливается управляющее воздействие . Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии изменение возмущающего воздействия вызывает изменение выходной величины . Большинство устройств систем управления являются инерционными.
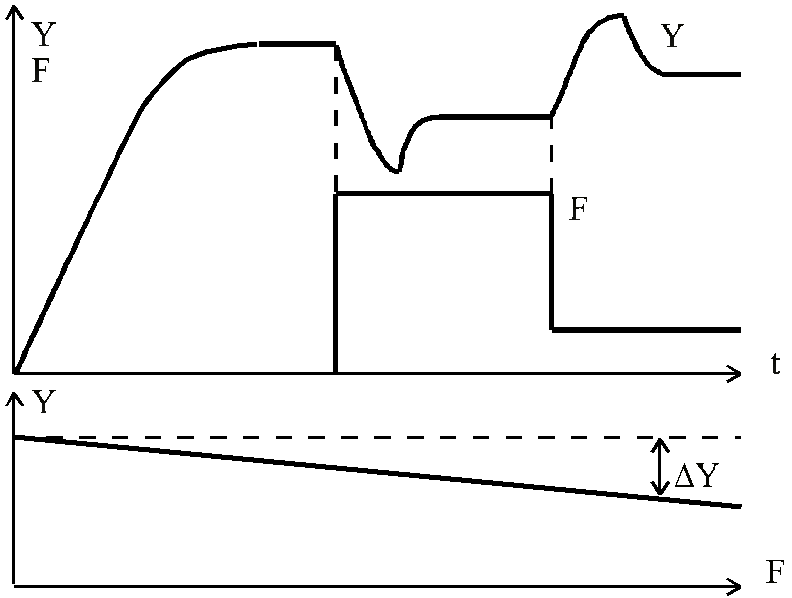
Рис. 1.3 – Изменение выходных величин объекта при изменении возмущающего воздействия. Нагрузочная характеристика САР |
Установившийся режим работы наступает лишь по истечении некоторого времени. В установившемся режиме работы свойства системы можно охарактеризовать с помощью нагрузочной характеристики. Нагрузочная
характеристика представляет собой
зависимость выходной величины системы
от возмущающего воздействия
В
разомкнутой системе нагрузочная
характеристика - это характеристика
объекта. Она не зависит от других
элементов (усилителя, исполнительного
устройства). Любые изменения возмущающего
воздействия вызывают изменения
выходной величины. Разомкнутую систему
можно оценить по величине отклонения
выходного сигнала
|