Тонкослоистые пласты
.pdfvk.com/club152685050 | vk.com/id446425943
ГЛАВА 12
МЕТОДЬ. ЯОКAnИ3АЦИИ СТВОЯА СКВJUКИИЫ
Методы локализации скважин применяются, когда необходимо знать
пространственное положение одного ствола скважины относительно
другого. Эта необходимость возникает в следующих случаях:
•При бурении вспомогательной скважины, которая нужна для того,
чтобы обеспечить глушение неконтролируемого выброса, инеобходи
мо попасть стволом одной скважины в ствол другой.
•Когда данные исследований ненадежны, во избежание пересечения
стволов скважин может возникнуть необходимость точного определе
ния их взаимного расположения.
• Некоторые технологии добычи (закачки) требуют того, чтобы скважи
ны находились на заданном расстоянии друг от друга.
Методология, отвечающая требованиям, предъявляемым к локализа
ции скважин, основана на использовании электромагнитного и магни
тостатического методов. В прошлом проводились исследования возмож
ности использования методов акустической локализации, однако они не
имели успеха.
12.1. МЕТОДЫ МАГНИТОСТАТИЧЕСКОЙ
ЛОКАЛИЗАЦИИ СКВАЖИН
Методы магнитостатической локализации основаны на том факте, что
стальные трубы в стволе скважины обычно имеют некоторую остаточ
Hyю намагниченность, вызывающую возмущение локального магнитного
поля Земли. Это магнитное возмущение может быть обнаружено с помо щью чувствительного магнитометра, помещаемого в необсаженную сква
жину, находящуюся вблизи той скважины, в которой находятся стальные
183
vk.com/club152685050184 Пракmuческuе Il|сnvkеюnы.com/id446425943геофизических исследовании скважин
трубы. Интерпретация величины магнитного поля, измеренной в зави симости от глубины, может в некоторых случаях дать точную оценку
расстояния до целевой скважины и направления к ней. Основными огра
ничениями этих методов обычно является малый диапазон расстояний,
в рамках которого могут быть зарегистрированы такие возмущения (как
правило, менее 15 м), инеопределенность природы намагниченности.
Поскольку стандартные средства исследований, такие как средства из
мерений в процессе бурения (measurement while drilling, MWD), сегодня обладают точными магнитометрами, специальные приборы для магни тостатической локализации не требуются. Однако интерпретация дан ных, полученных с помощью таких приборов, дело непростое. Надеюсь,
что последующая информация будет полезна для знакомства с некото рыми подобными методами, а также для лучшего понимания магнитных
измерений вообще.
12.1.1. Намагниченность стали обсадных и буровых колонн
впроцессе производства, последующего магнитного исследования
или вследствие получения механических ударов сталь, используемая для
изготовления обсадных и бурильных труб, а также оснастки (например, ясы, утяжеленные бурильные трубы, буровые коронки), приобретает
определенную степень намагниченности. Простейшая модель описания
поля, вызываемого такой намагниченностью, основана на суперпозиции
магнитных точечных монополей с северной или южной полярностью. Се
верный монополь определяется как монополь, силовые магнитные линии
которого направлены симметрично и сферически по направлению к по
люсу; в отношении южного полюса эти линии располагаются аналогич
но, но направлены в сторону, противоположную от него. Хотя в природе
свободные монополи никогда не наблюдаются, в случае двух значительно удаленных друг от друга полюсов поле вблизи одного из них будет оп peдeляTьcя именно им, а влиянием удаленного полюса можно пренеб
речь. Когда два или более полюсов находятся на одинаковом расстоянии
от точки измерения, поле представляет собой линейную суперпозицию
составляющих поля монополя, связанных с каждым из полюсов в отде
льности. Создаваемое монополем магнитное поле в декартовой системе
координат можно записать следующим образом:
Fx |
= flr х М х х/(4 Х J( Х ~); |
(12.1.1) |
Fy = flr Х М Х у/(4 Х J( Х ~); |
(12.1.2) |
|
Fz = flr Х М Х z/(4 Х J( Х ('), |
(12.1.3) |
|
где |
r = ~(X2 + У2 +Z2)' м; |
|
vk.com/club152685050Л:lеm|одыvkлокаЛ.com/id446425943l13ацuu ствола 'ЖВll.ЖUНЫ 185
м - магнитный поток, Вб;
Fx ' Fy' F= - составпяющие магнитной индукции, Тп;
f1r - относитепьная магнитная проницаемость среды;
х, у, z - расстояния от монопопя до точки измерения вдопь осей х, у
и Z, м.
Обычно попагают f1r = 1,0, так что этому чпену в бопьшинстве спучаев
не придают значения. Направпения осей х, у, Z системы координат выби
раются так, чтобы ось х указывапа на сеточный север, ось у - на сеточ
Hый восток, а ось Z быпа направпена вертикапьно вниз.
12.1.2. Интерпретация магнитных аномалий
Когда измерение параметров магнитного попя осуществпяется посредс
твом трехосевого магнитометра, компоненты этого поля Бх, Бу и Бz в дека
ртовой системе координат проецируются на три оси прибора. В системе
координат прибора ось Z направпена вдопь ствопа скважины, а оси х и у
вспедствие вращения прибора произвопьно ориентированы в ппоскости (называемой плоскостью датчика), перпендикупярной стволу скважины.
Еспи в приборе имеются аксеперометры, угоп между осью х прибора (так называемой рабочей плоскостью прибора) и направпением на верхнюю часть (highside, HS) скважины известен. Это дает возможность преобразо
вать компоненты х и у системы координат прибора в компоненты системы
координат, в которой ось х имеет то же направпение, что и HS, а ось у маг нитометра повернута от него в ппоскости датчика на 90 градусов по часо
вой стрелке (то есть в «верхнем правом» направпении (highside right, HSR)).
Поспе проведения преобразования посредством такого поворота показа
ния магнитометра приведены к системе координат скважины. Компонен
ты Бх и Бу заменяются соответственно на Бhs и Бhsr• Компонент Бz остается неизменным, хотя во избежание путаницы заменяется на Бах. Если накпон и азимут скважины известны, то возможно дальнейшее преобразование компонентов Бhs, Бhsr И Бах в компоненты Бх, Бу' и Бz декартовой системы ко ординат. Названные выше вепичины иппюстрируются на рис. 12.1.1.
Попе, измеряемое магнитометром в исспедуемой скважине, явпяется
векторной суммой попей, обусповпенных какими-пибо аномапиями и маг
нитным попем Земпи. Прежде чем интерпретировать эти магнитные ано мапии, из показаний магнитометра допжна быть удапена составпяющая,
связанная с воздействием магнитного попя Земли. Поэтому основная про цедура нахождения попожения цепевой скважины с помощью трехосевого
магнитометра в комбинации с аксеперометрами состоит в спедующем:
1. С помощью данных аксеперометров первичные показания магнито
метра переводятся в систему координат скважины.
vk.com/club152685050 | vk.com/id446425943 |
187 |
/Vlетоды локализации ствола скважины |
|
Приведенные выше пять величин можно нанести на I'рафик зависи |
|
мости от глубины вспомогательной скважины, |
|
4, Возмущение магнитного поля Земли, определяемое |
компонентами |
Р, должно интерпретироваться исходя из суперпозиции монополей, располагаемых вдоль целевой скважины. Это делается путем модели
рования следующим образом. С помощью предполагаемого набора
создаваемых полюсами магнитных потоков и расположения полю
сов по глубине целевой скважины в системе координат скважины по
магнитометру исследуемой скважины моделируется магнитное поле.
110делирование основано на совместном использовании уравнений 12.1.1-12.1.3 и данных обследования обеих скважин. Чтобы изме ренный и моделируемый наборы данных в зависимости от глубины
соответствовали друг другу, необходимо перемещать предполагаемое
положение целевой скважины относительно положения вспомога тельной и варьировать предполагаемое распределение полюсов в це
левой скважине до тех пор, пока не будет найден наилучший вариант
подгонки.
Недостатки вышеприведенного подхода:
1. Эффект размывания. 110дель точечного монополя может оказаться неприменимой, если намагниченность размазана вдоль оси трубы.
В результате оценка расстояния может оказат ,ся сильно завышен ной.
2. Плохо определяемое направление HS. Если вспомогательная сква
жина почти вертикальна, направление HS становится трудно опреде
лить, вследствие чего становится невозможно корректно учитывать
влияние магнитного поля Земли в плоскости датчика. Эту проблему
можно обойти, обеспечивая при бурении наклон контролируемой
скважины, равный нескольким градусам.
3. Нелинейные траектории стволов скважин. Настоятельно рекомен
дуется, чтобы при приближении к целевой скважине в процессе бу
рения вспомогательной скважины ее угол наклона и азимут остава
лись неизменными. Это связано с тем, что, пока магнитометры под
BepгaюTcя влиянию возмущения, нормальный контроль траектории
ствола скважины невозможен. Хотя эта проблема и может быть ре
шена с помощью применения гироскопа во вспомогательной сква
жине, в необсаженной скважине это обычно не практикуют. Также
если система координат скважины не остается достаточно стабиль
ной, становится гораздо сложнее обеспечить визуализацию целевой
и вспомогательной скважин.

vk.com/club152685050 | vk.com/id446425943 |
|
188 |
lIракmuческuс аспекты геофизических исследований скваЖlm |
12.1.3. Учет влияния магнитного поля Земли
Теперь посмотрим, как вывести компоненты магнитного поля Земли в системе координат скважины. Пусть магнитное поле Земли определя
ется параметрами:
•Е}, - горизонтальная составляющая магнитного поля Земли.
•Е" - вертикальная составляющая магнитного поля Земли.
•Магнитное склонение - угол по часовой стрелке между направлением
на географический и на магнитный север.
Составляющие вектора магнитного поля Земли в декартовой системе
координат:
Ех = Е}, х соs(угол магнитного склонения); |
(12.1.9) |
Еу = Eh Х siп(угол магнитного склонения); |
(12.1.10) |
Ez = Е,.. |
(12.1.11) |
По данным искривления вспомогательной скважины для каждой точ
ки наблюдения вдоль ее траектории можно определить орт декартовой
системы координат RVEC. Чтобы определить направление на верхнюю часть скважины (HS), сначала рассматривают единичный вектор, направ
ленный под углом 90 градусов по часовой стрелке от HS в плоскости дат чика по направлению HSR.
НSR~[~1ЛRVЕс. (12.1.12)
где 1\ обозначает векторное произведение (см. приложение 4). Вектор HS
принимает вид:
HS = HSR 1\ RVEC. |
(12.1.13) |
Три вектора HS, HSR и RVEC должны быть преобразованы в единич Hыe вектора (то есть разделены на собственную амплитуду) для опреде ления системы координат скважины. Далее они обозначаются, как HS\
НSRЛ и RVЕСл. Составляющие магнитного поля Земли в системе коорди
нат скважины:
(12.1.14)
где. означает скалярное произведение.
(12.1.15)

Методы локализации ствола скважины |
189 |
vk.com/club152685050 | vk.com/id446425943 |
|
|
(12.1.16) |
12.1.4. Преобразование результатов измерений в систему координат скважины
Необработанные составляющие Вх, Ву и Bz магнитометра преобразуют
ся в систему координат скважины следующим образом. Показания ак
селерометра, входящего в компоновку зонда, обозначим как Ах, ~ и A z.
Ориентация рабочей плоскости прибора по отношению к направлению
HS определяется как:
8 = arctg(~/AJ. |
(12.1.17) |
Функция arctg обычно возвращает значение 8 в диапазон от -90 до +90
градусов, а нас интересует угол (от 00 до 3600) по часовой стрелке между
направлением HS и рабочей плоскостью прибора, обозначаемый HSTF.
Чтобы из угла 8 получить угол HSTF, необходимо сделать преобразова ние, показанное в таблице 12.1.1.
B"s и B hsr определяются из следующих уравнений: |
|
|
Bhs |
= ВХ Х cos(HSTF) - Ву х sin(HSTF); |
(12.1.18) |
Bhsc |
= ВХ Х sin(HSTF) + Ву х cos(HSTF). |
(12.1.19) |
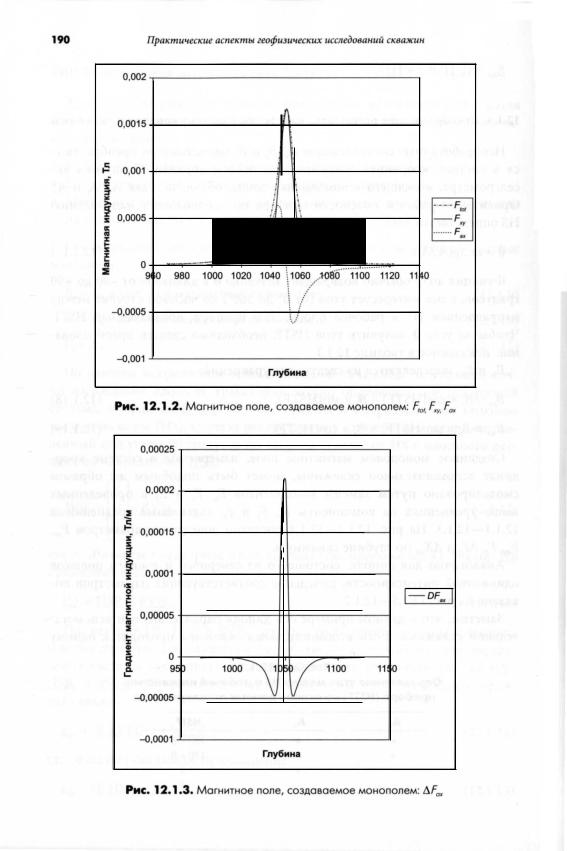
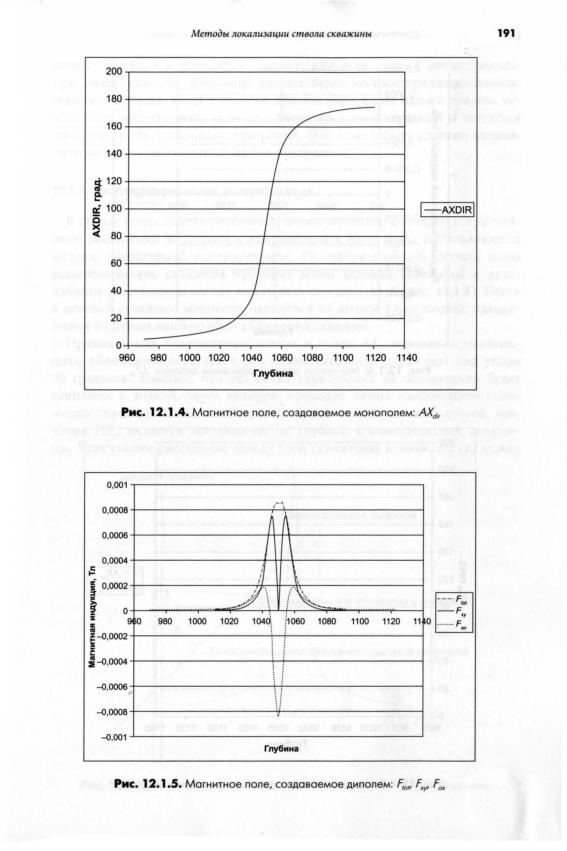
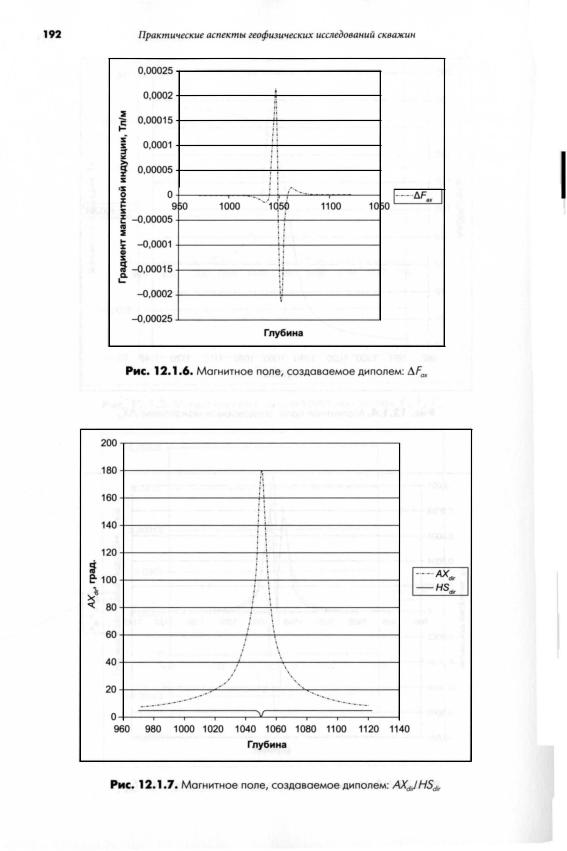
Созданное монополем магнитное поле, измеряемое в системе коор динат вспомогательной скважины, может быть подобным же образом
смоделировано путем замены компонентов Ех, Еу и Е, в приведенных
выше уравнениях на компоненты рх' Ру и Fz, задаваемые уравнениями
12.1.1-12.1.3. На рис. 12.1.2-12.1.4 показано поведение параметров Ftot ,
Рху' Fz , !'J.Fz и AXdir по глубине скважины.
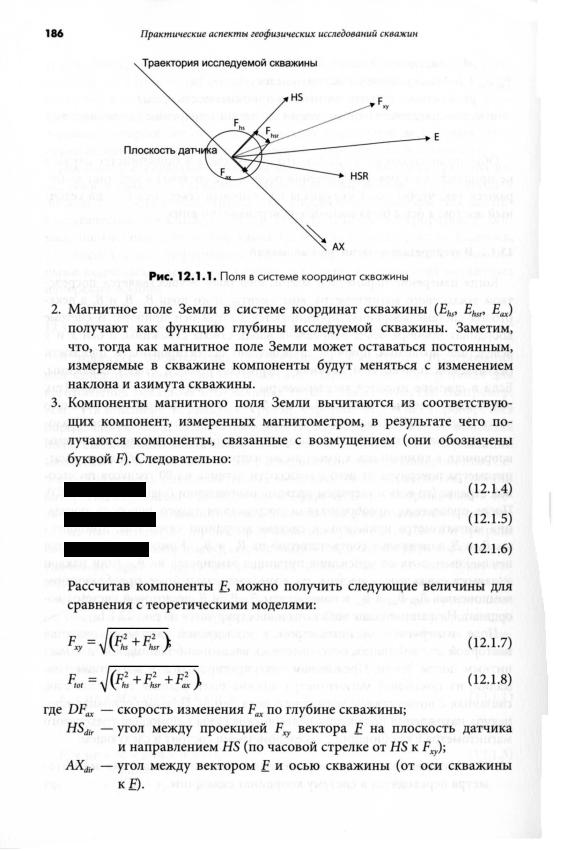
Аналогично для диполя, состоящего из северного и южного полюсов
одинаковой интенсивности, поведение соответствующих параметров по
казано на рис. 12.1.5-12.1.7.
Заметим, что в данном примере ось диполя параллельна оси вспомога тельной скважины. Если вспомогательная скважина проходит к одному
Таблица 12.1.1
Определение уrла между HS и рабочей плоскостью
прибора (HSTF) на основе данных акселерометра
Ах |
А., |
HSTF |
|
+ |
+ |
180 |
- 8 |
+ |
|
180 |
- 8 |
|
+ |
-8 |
|
|
|
-8 |
|
|
|
|
|