

9.4 Измерительные схемы индуктивных датчиков
К числу
контролируемых электрических параметров
схемы замещения индуктивного измерительного
преобразователя относятся: индуктивность
и пределы ее изменения (![]() );
взаимная индуктивность (М); полная
электрическая добротность преобразователя
в определенном диапазоне частот (Q);
собственная емкость преобразователя
(С); активное сопротивление обмотки
преобразователя (R).
);
взаимная индуктивность (М); полная
электрическая добротность преобразователя
в определенном диапазоне частот (Q);
собственная емкость преобразователя
(С); активное сопротивление обмотки
преобразователя (R).
Кроме перечисленных
основных параметров, иногда возникает
необходимость определения некоторых
дополнительных параметров, например
таких, как мощность полных потерь,
частота собственного резонанса (![]() ),
электрическая прочность и сопротивление
изоляции обмотки.
),
электрическая прочность и сопротивление
изоляции обмотки.
Величину L определяют в зависимости от режима работы преобразователя одним из следующих методов - мостовым методом, резонансным методом и методом резонансной схемы замещения.
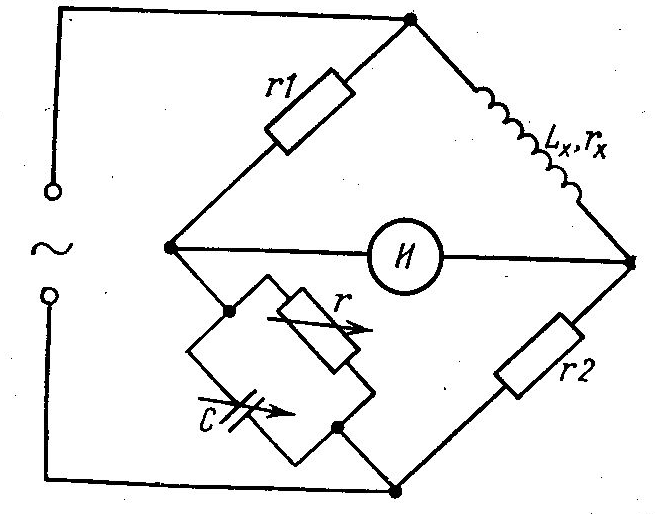
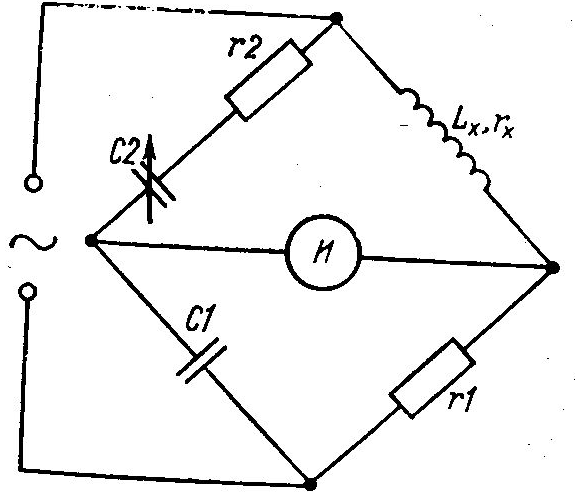
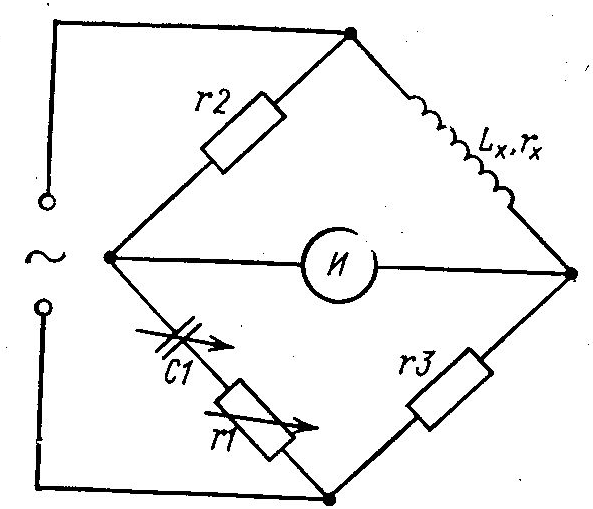
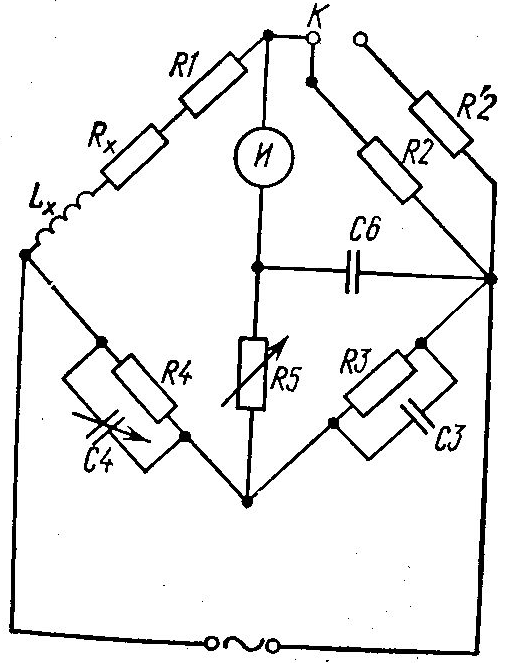
Мостовые измерительные схемы. В настоящее время данные методы получили наибольшее распространение в лабораторной и производственной практике. Благодаря относительной простоте этих методов, высокой точности измерения и возможности дополнительно измерять значение активного сопротивления преобразователя разработан ряд типовых четырехплечих мостовых схем, среди которых следует выделить мостовые схемы Максвелла – Вина (рис. 9.10а), Оуэна (рис. 9.10б ), Хея (рис. 9.10в), и схему шестиплечевого моста Андерсона-Быкова (рис. 9.10г).
а) б)
в) г)
Рис. 9.10 Разновидности схем измерительных мостов: Максвелла – Вина (а), Оуэна (б), Хея (в), Андерсона-Быкова(г).
Как правило, уравновешивание перечисленных схем достигается в результате наложения изменений в двух и более независимых параллельных ветвях элементами сопротивления, находящимися в квадратуре по отношению друг к другу.
В зависимости от вида мостовой схемы эти элементы могут иметь разнотипный характер. Каждая из этих схем обеспечивает определенный уровень относительной чувствительности преобразователя к изменению его параметров.
Одним из основных параметров мостовой схемы является угол сходимости, представляющий собой угол между векторами напряжений в регулируемых ветвях схемы. Для мостов с хорошей сходимостью (большой угол сходимости) уравновешивание моста достигается путем небольшого числа последовательных регулировок и заканчивается довольно быстро.
Определенный интерес представляют поиски путей расширения частотного диапазона мостовых схем. Диапазон рабочих частот для большинства из известных к настоящему времени схем ограничен областью звуковых частот. Попытки расширить диапазон в сторону высоких частот наталкиваются на трудно преодолимое препятствие – повышение роли токов утечки. Это явление обусловливает значительное снижение точности измерений. Одним из основных способов подавления таких помех является применение вспомогательных цепей с регулируемыми параметрами.
Резонансные методы измерения. В основу резонансных методов измерения параметров измерительного преобразователя положено использование приближенной формулы Томсона. Например, для определения индуктивности катушки индуктивного преобразователя используют зависимость вида:
![]() .
(9.33)
.
(9.33)
Несмотря на простоту этого метода, он не свободен от ряда существенных недостатков. Один из них – приближенная исходная формула, которую можно считать справедливой для измерительных преобразователей с высокой добротностью (более 25 - 30).
Метод резонансной схемы замещения. Его можно рассматривать как модификацию рассмотренного выше резонансного метода измерения. При реализации данного метода первоначально колебательный контур, состоящий из переменной емкости и эталонной индуктивности, настраивается в резонанс путем подстройки значения емкости. Затем производится переключение схемы на измеряемую индуктивность и по величине напряжения на вторичной обмотке трансформатора определяется значение индуктивности (рис. ).
Метод резонансной схемы замещения характеризуется высокой степенью универсальности (позволяет производить измерения в широком диапазоне частот и амплитуд сигналов).
В зависимости от характера измеряемой физической величины и условий эксплуатации устройства производится выбор соответствующего типа измерительной схемы датчика.