

2.3. Перетворення координат точки площини при зміні прямокутної системи координат
У разі переході від однієї прямокутної системи координат до іншої мають місце два випадки, що геометрично різні, а формально-алгебраїчно однакові:
1)
Одну систему координат можна отримати
з іншої поворотом на кут
 (рис.
4).
(рис.
4).
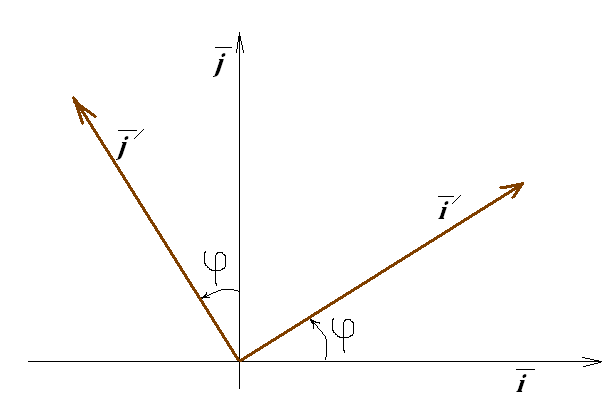
Рис. 4
2) Одну систему координат можна отримати з іншої за рахунок двох перетворень (рис. 5):
а) повороту на кут ;
б)дзеркального відображення.
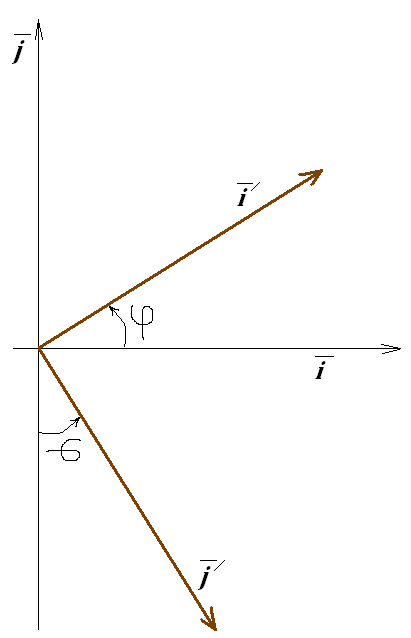
Рис. 5
1)
Нехай у першій системі координат
 точка М
має координати (х,у)
у другій
точка М
має координати (х,у)
у другій
 .
Раніше було встановлено, що:
.
Раніше було встановлено, що:
 ,
,
 ,
де С=(
,
де С=( )
– матриця переходу.
)
– матриця переходу.
Знайдемо матрицю переходу:
 ,
,
 .
.
За теоремою про геометричний зміст декартових прямокутних координат маємо:
c11
=
прii¢=
½i¢½cosj=
cosj
c21 = прji¢ = ½i¢½cos(90° - j) = ½i¢½sinj = sinj,
c12 = прij¢ = ½j¢½cos(90° + j) = -½i¢½sinj = - sinj,
c22 = прjj¢ = ½j¢½cosj = cosj.
Тоді
 .
.
Отже, формули перетворення координат при повороті системи координат на кут мають такий вигляд:
 ,
,

2) Якщо провести аналогічні розрахунки, одержимо
 ,
,
 .
.
3. Лінії і поверхні
3.1. Поняття рівняння лінії, рівняння поверхні
Розглянемо афінну систему координат.
Означення 1. Рівність
f(x,y)=0 (3.1.1)
називають рівнянням лінії L, якщо справджуються дві умови:
1)координати (х,у) будь-якої точки М, що належить лінії L, задовольняють рівність (3.1.1);
2) координати(х,у) будь-якої точки М, що не належить лінії L, не задовольняють рівність (3.1.1).
Розглянемо в просторі систему координат і поверхню S.
Означення 2. Рівність
f(x,y,z)=0 (3.1.2)
називають рівнянням поверхні S, якщо виконуються такі умови:
1)координати (х,у,z) будь-якої точки М, що належить поверхні S, задовольняють рівність (3.1.2);
2) координати (х,у,z) будь-якої точки М, що не належить поверхні S, не задовольняють рівність (3.1.2).
Наприклад:
 .
.
Якщо розглянути дане рівняння на площині, то у відповідній системі координат воно являє собою рівняння лінії, а саме рівняння кола з радіусом 1 та центром у початку координат.
Якщо ж розглядати рівняння у просторі, отримаємо
 .
.
Це циліндрична поверхня з твірною, паралельною осі Оz.
Лінію в просторі можна задати перетином двох поверхонь, тобто такою систему:

3.2. Параметричні рівняння лінії та поверхні
Лінію на площині та в просторі можна розглядати як слід рухомої точки. Тоді координати точки є функції часу, на площині:
 (3.2.1)
(3.2.1)
та просторі:
 (3.2.1/)
(3.2.1/)
Означення. Рівності (3.2.1) і ((3.2.1/)) називають параметричними рівняннями лінії L на площині (у просторі), якщо виконуються дві умови:
1)
для будь-якої точки М*(х*,y*)
( (x*,y*,z*)
у просторі), що належить L, існує таке
значення параметра
(x*,y*,z*)
у просторі), що належить L, існує таке
значення параметра
 ,
що
,
що

 (3.2.2/)
(3.2.2/)
2) для будь-якої точки М(х,y) (М(x,y,z)), що не належить L, не існує таке значення параметра t, єдине для кожного з рівнянь.
Означення.
Рівності



називають параметричними рівняннями поверхні S, якщо виконуються дві умови:
1)
для будь-якої точки
(х*,y*,z*),
що належить S,
існує пара значень параметрів
 таких, що
таких, що

 ,
,

2) для будь-якої точки , що не належить S, такої пари параметрів, єдиної для всіх трьох рівностей, не існує.