

5. Криві й поверхні другого порядку
5.1. Дослідження кривих і поверхонь другого порядку за їх канонічним рівнянням Дослідження цього питання здійснюється за таким планом:
П Л А Н
І. Дослідження кривих другого порядку
1. Еліпс
1.1.
Означення і виведення канонічного
рівняння

1.2. Дослідження форми, ексцентриситет, директриси
1.3. Полярне рівняння
2. Гіпербола
2.1.
Означення і виведення канонічного
рівняння

2.2. Дослідження форми, ексцентриситет, директриси, асимптоти
2.3. Полярне рівняння
3. Парабола
3.1. Означення і виведення канонічного рівняння
3.2. Дослідження форми, ексцентриситет, директриса
3.3. Полярне рівняння
4. Інші властивості
ІІ. частина
Дослідження поверхонь другого порядку за допомогою перерізів, паралельних координатним площинам:
1)
еліпсоїда
за його канонічним рівнянням
 ;
;
2)
однопорожнинного
гіперболоїда
 та двопорожнинного –
та двопорожнинного –
 ;
;
3)еліптичного
параболоїда та гіперболічного
та гіперболічного
 ;
;
4)конуса
 ;
;
5)
циліндрів
еліптичного
,
гіперболічного
,
параболічного
 .
.
5.2. Перетворення рівняння кривої при зміні прямокутної системи
Домовимось записувати рівняння кривої другого порядку у вигляді
 (5.2.1)
(5.2.1)
Розглядатимемо лише перехід від однієї прямокутної системи до іншої прямокутної. Як відомо для таких систем суттєво різними є два перетворення:
паралельний перенос початку;
поворот осей координат.
За таких переходів на основі теореми про інваріантність порядку ми будемо отримувати рівняння такого ж вигляду.
Перетворення рівняння кривої другого порядку при переносі початку
Нехай
у прямокутній системі координат O крива
має вигляд рівняння (5.2.1), здійснимо
перенесення початку (Рис. 11). Відомо, що
у випадку перенесення початку в точку
О’(х0,у0)
координати
точки перетворюються за правилом
крива
має вигляд рівняння (5.2.1), здійснимо
перенесення початку (Рис. 11). Відомо, що
у випадку перенесення початку в точку
О’(х0,у0)
координати
точки перетворюються за правилом
 (5.2.2)
(5.2.2)
У другій системі координат одержимо рівняння
 (5.2.1/)
(5.2.1/)
Постановка
задачі.
Знайти зв’язок чисел
 .
.
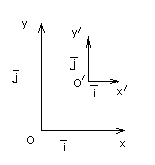
Рис. 11
Підставимо формули (5.2.2) у рівність (5.2.1):
 (5.2.3)
(5.2.3)
Порівняємо коефіцієнти рівнянь (5.2.3) і (5.2.1).
К
оефіцієнт
при
 =
=


 (5.2.4)
(5.2.4)
 (5.2.5)
(5.2.5)
вільний
член

 (5.2.6)
(5.2.6)
Зауважимо, що а33=f(x0,y0). Отже, у разі переносі початку не змінюються коефіцієнти при членах другого вимірювання. Інші коефіцієнти змінюються за законом (5.2.4), (5.2.5) і (5.2.6).
Перетворення рівняння кривої другого порядку при повороті осей
Нехай
в деякій систему координат О,
 крива має рівняння (5.2.1).
Здійснимо
поворот осей координат на кут
(Рис. 12). Нехай в отриманій системі
координат рівняння набуває вигляду
(5.2.2).
Треба
знайти зв’язок
між
крива має рівняння (5.2.1).
Здійснимо
поворот осей координат на кут
(Рис. 12). Нехай в отриманій системі
координат рівняння набуває вигляду
(5.2.2).
Треба
знайти зв’язок
між
 і
і
 .
.
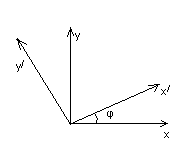
Рис. 12
Відомо, що при повороті осей на кут координати точки змінюються за законом

Підставимо ці формули в рівняння (5.2.1):
 .
.
Після
розкриття дужок можна переконатися, що
коефіцієнти при
 ,
,
 ,
тобто коефіцієнти
,
тобто коефіцієнти
 можуть бути виражені лише через
можуть бути виражені лише через
 ,
,
 ,
,
 ,
а коефіцієнти при
,
а коефіцієнти при
 та
та
 ,
тобто коефіцієнти
,
тобто коефіцієнти
 та
та
 –
лише через
–
лише через
 ,
,
 ,
,
 .
.
Знайдемо
коефіцієнт
 при
при
 .
.
 +2
+2 .
.
Доведемо,
що завжди існує поворот на такий кут
,
за якого в перетвореному рівнянні (2)
зникає член, що містить
,
тобто
 Для
цього треба довести, що тригонометричне
рівняння
Для
цього треба довести, що тригонометричне
рівняння
 +2
+2 (5.2.7)
(5.2.7)
має розв’язок. Це рівняння можна записати в такому вигляді:
( )sin2
)sin2 2
2 =0,
=0,

Розглянемо два випадки для а12:
 тоді
тоді
 . Звідси
визначимо кут
2:
. Звідси
визначимо кут
2:

Якщо
 ,
то вже в початковому рівнянні (5.2.1) немає
попарного добутку.
,
то вже в початковому рівнянні (5.2.1) немає
попарного добутку.
Практично поворот на кут краще знаходити іншим способом. Для цього запишемо рівняння (5.2.7) у такому вигляді:
 +
+ =0.
=0.
Поділимо
його на
 :
:

Взагалі
існує два розв’язки
 і
і
 .
Візьмемо будь-який із них. Позначимо
вибраний тангенс через
.
Візьмемо будь-який із них. Позначимо
вибраний тангенс через
 .
Тоді для знаходження формули повороту
за формулою 1+
.
Тоді для знаходження формули повороту
за формулою 1+ знайдемо
знайдемо
 .
Маємо два значення для
.
Маємо два значення для
 .
Виберемо
одне зі значень, тоді
.
Виберемо
одне зі значень, тоді
 Таким
чином отримаємо формули повороту. Отже,
поворот знайдено.
Таким
чином отримаємо формули повороту. Отже,
поворот знайдено.