

технология бурения 2
.pdfvk.com/club152685050 | vk.com/id446425943
время системы эксплуатируются в ОАО «Татнефть», ОАО НПФ «Геофизика», ОАО «Газпром».
Забойная телеметрическая система ЗТС-36КК ( ОАО НПФ ВНИИГИС, г. Октябрьский). Уверенная работа комбинированного канала связи этой телесистемы с повышенной пропускной способностью в любом геологическом разрезе и при любой конструкции скважины достигается «верхним» расположением блока беспроводного канала связи и соединением его с глубинными датчиками через отрезок каротажного кабеля длиной до 2500 м. Применение комбинированного канала связи с беспроводным электромагнитным окончанием снимает целый ряд таких проблем, как пропадание сигнала в солевых пропластках и на больших глубинах, повышенные температурные требования к турбогенератору и буферному аккумуляторному питанию.
Вследствие малого диаметра телесистемы (36 мм) она может применяться при бурении дополнительных стволов диаметром 120 мм, а при установке межблочных переходников пропускаться внутри бурильного инструмента через участки ствола с радиусом 20 м.
В настоящее время заканчивается изготовление опытного образца телесистемы.
Телесистема ЗТС-42ННКТ (ОАО НПФ ВНИИГИС, г. Октябрь-
ский). Разработана по заказу АНК «Башнефть» для бурения при отрицательном перепаде давления с колтюбинговой установки М4001. Система проектировалась на базе ЗТС-42. Для передачи информации с наддолотного модуля используется электромагнитный канал связи с основным модулем телесистемы, информация с которого на поверхность передается уже по кабелю, встроенному в бурильную колонну.
Аппаратно-программный комплекс « Волга» предназначен для автоматизированного контроля процесса бурения нефтегазовых скважин, проведения геолого-технологических и геохимических исследований, с целью оперативного управления бурением и обеспечения безаварийности и безопасности проводки скважин.
Геолого-технологическая информация от наземных датчиков на буровой и забойной телеметрической системы поступает на контроллер сбора и первичной обработки данных, после чего передается на компьютер оператора на буровой. Проектные данные на строительство скважины, предоставленные заказчиком, данные ГИС по скважинам также вносятся в базу данных компьютера оператора.
Вся полученная и внесенная информация обрабатывается специальными программными модулями и в реальном масштабе времени, с помощью средств связи, поступает на Сервер данных, где хранится и доступна неограниченному числу пользователей. При этом каждый Пользователь имеет свой уровень доступа к информации. АПК «Волга» позволяет наблюдать за процессом бурения в реальном масштабе времени, получать
40
289
vk.com/club152685050 | vk.com/id446425943
полную и объективную информацию со скважин, контролировать процесс бурения, оперативно принимать решения по оптимизации строительства скважин, находясь даже на значительном удалении от буровой.
Уникальность технологии заключается в том, что АПК «Волга» – это самообучающаяся система, которая накапливает базу знаний по аварийным ситуациям и непредвиденным осложнениям на скважине и на основе экспертной оценки текущего состояния скважины выдает готовые управленческие решения, что позволяет минимизировать нарушения технологии, повысить технико-экономические показатели строительства скважин, сократить расходы на привлечение высококвалифицированного управленческого персонала на буровой.
Комплекс обеспечивает:
–сбор информации с датчиков, в том числе от аппаратуры газового каротажа и забойных телеметрических комплексов;
–контроль технологических процессов бурения;
–непрерывный контроль строительства скважины на соответствие проекту на бурение;
–обработку и передачу геолого-геофизической, технологической информации в реальном масштабе времени средствами радио, сотовой, спутниковой или проводной связи на сервер данных;
–накопление и хранение всей полученной информации по скважине;
–визуализацию всей полученной по скважине информации;
–формирование отчетности по всем событиям, происходящим на буровой;
–построение двух- и трехмерной модели скважины или куста скважин по проектным, фактическим и замеренным данным;
–определение критического сближения скважин, расчет компоновок (КНБК) и прогнозирование их поведения;
–построение многофакторной геологической модели месторождений и скважин в процессе бурения, исследования шлама и керна;
–экспертную поддержку процесса бурения, прогнозирование и предупреждение возникновения аварийных ситуаций и осложнений;
–оперативное определение покомпонентного состава углеводородов в буровом растворе при проведении газового каротажа;
–определение литологического разреза, выделение пластов-коллекторов;
–круглосуточное видеонаблюдение на буровой.
12.5. Роторные управляемые системы
Абсолютное большинство ГС бурится с использованием забойных двигателей. Однако при бурении ГС забойными двигателями возникают серьезные трудности. Главными из них являются проблемы с транспортом
41
290
vk.com/club152685050 | vk.com/id446425943
выбуренной породы по горизонтальной и сильнонаклонной части ствола, трудности с передачей нагрузки на долото вследствие больших сил трения, необходимость подъема бурильной колонны и смены компоновки при достижении заданных параметров кривизны ствола и т.д. Эти трудности возрастают с увеличением длины горизонтального участка.
При строительстве скважин на шельфе в силу ряда причин (высокая стоимость морских платформ, сложная ледовая обстановка) возникает необходимость проводки скважин с очень большими отходами, у которых длина ствола L много больше глубины скважины по вертикали Н (L/H>>1). Проводка таких скважин с использованием забойных двигателей при невращающейся бурильной колонне в ряде случаев вообще невозможна.
Все это обусловило необходимость разработки роторных управляемых систем (РУС).
Первый патент на роторную управляемую компоновку относится к 1902 году. В нем была заложена возможность разработки систем для бурения с непрерывным отклонением компоновки низа бурильной колонны от оси скважины при её вращении.
На данный момент подобные системы были разработаны основными зарубежными производителями, такими как «Бейкер-Хьюз», «Халлибёртон», «Нобль Дриллинг», «Шлюмберже», «Ротари Стирабл Тулз». Они различаются по конструкции, но основным их принципом является использование вращающейся вместе с колонной труб телеметрической системы, на которой установлены внешние или внутренние отклоняющие элементы. Последние управляются электроникой, синхронизируются с вращением бурильной колонны и находятся в постоянном контакте со стенками скважины или валом близи долота, что позволяет вести непрерывное управление траекторией ствола скважины.
Автономная телеметрическая система выдает замеры инклинометрии и свойств горных пород, слагающих разрез скважины, на поверхность посредством различных каналов связи, чаще всего гидравлического канала. Большинство телесистем также управляется с поверхности посредством передачи управляющих сигналов, то есть существует двусторонний канал связи. Следует отметить, что некоторые интеллектуальные роторные телесистемы могут быть запрограммированы на полностью автономную работу по бурению ствола скважины с использованием алгоритмов исправления траектории.
Роторные управляемые системы позволяют бурить пологие и горизонтальные скважины с более ровным профилем из-за отсутствия перегибов ствола (обычных при использовании забойных двигателей) с большим отходом за счет снижения трения и лучшей очистки ствола. Более высокая скорость проходки с постоянным вращением бурильной колонны предотвращает вероятность прихватов бурильного инструмента, сокращает время на очистку ствола от выбуренной породы, снижает пагубное воздействие
42
291
vk.com/club152685050 | vk.com/id446425943
бурового раствора на продуктивный пласт и обеспечивает более быстрый ввод скважин в эксплуатацию.
Роторные управляемые системы можно разделить на два основных типа по способу управления смещением долота относительно оси скважины:
1)«Push the bit» – толкание долота, что вызывает давление на боковую поверхность долота в определенном направлении. К этому типу можно отнести системы «Автотрак» – «Бейкер-Хьюз Интек», «Пауэрдрайв» – «Шлюмберже», «Веллдиректор» и «Экспрессдрилл» – «Нобль Дриллинг».
2)«Point the bit» – позиционирование долота. Достигается смещени-
ем приводного вала относительно компоновки либо изменением его кривизны, что вызывает изменение угла атаки вооружения долота. К этому типу можно отнести: «Геопилот» – «Сперри-Сан», «АГС» – «КДАЛ», «Смартслив» – «Ротари Стирабл Тулз», «Андердрилл» и «ДАРТ» – «Андергейдж».
РУС первого типа получили наибольшее распространение благодаря относительно простому устройству и надежности.
Компании-производители обычно выпускают несколько типоразмеров своей продукции. Такие системы, как «Смартслив», «Веллдиректор» в различных конфигурациях в зависимости от геометрических характеристик можно отнести и к первому типу, и ко второму.
Положительные стороны роторных управляемых систем:
–увеличение механической скорости проходки и, соответственно, уменьшение времени бурения скважины за счет более равномерной отработки долота и исключение подъема работоспособного долота для изменения геометрии забойного двигателя;
–улучшение очистки скважины от шлама, сокращение времени на промывку перед наращиванием и СПО;
–уменьшаются динамические скачки давления, снижается вероятность гидроразрыва пород;
–улучшается качество ствола с минимальной микрокривизной, отсутствие спиральной выработки за счет постоянного контроля положения режущей поверхности долота, что позволяет провести успешное
еезаканчивание;
–позволяет проводить сложные трехмерные профили с большим отходом.
К недостаткам можно отнести:
–необходимость использования верхнего привода;
–высокие требования к очистке бурового раствора, низкому содержанию твердой фазы и материалов для ликвидации поглощений;
–сложность обслуживания на буровой, необходимость привлечения персонала подрядчика;
–внедрение дополнительных датчиков в систему буровой;
43
292
vk.com/club152685050 | vk.com/id446425943
–ограничения к расходу бурового раствора и буровым насосам;
–использование специализированных долот.
12.5.1. Роторные управляемые системы с радиальным смещением долота «Толкание долота»
Технология радиального смещения долота заключается в использовании отклонителей, которые позволяют создавать давление на боковую поверхность долота в направлении, противоположном действию отклонителей. При этом отклоняется вся РУС или большая её часть.
К этому типу относятся системы «Автотрак» – «Бейкер-Хьюз Интек», «Пауэрдрайв» – «Шлюмберже», «Веллдиректор» – «Нобль Дриллинг».
«АВТОТРАК» – «БЕЙКЕР-ХЬЮЗ ИНТЕК». В системе «Авто-
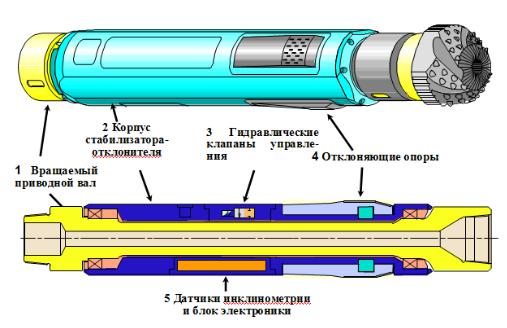
трак» основным элементом конструкции является невращаемый стабили- затор-отклонитель (рис. 12.19).
Рис. 12.19. Невращаемый стабилизатор-отклонитель
На вращаемом приводном валу 1 размещается корпус невращаемого стабилизатора-отклонителя 2, в котором встроены блок электроники и датчики инклинометрии 5, управляющие гидравлическими клапанами 3, приводящими в действие отклоняющие опоры 4.
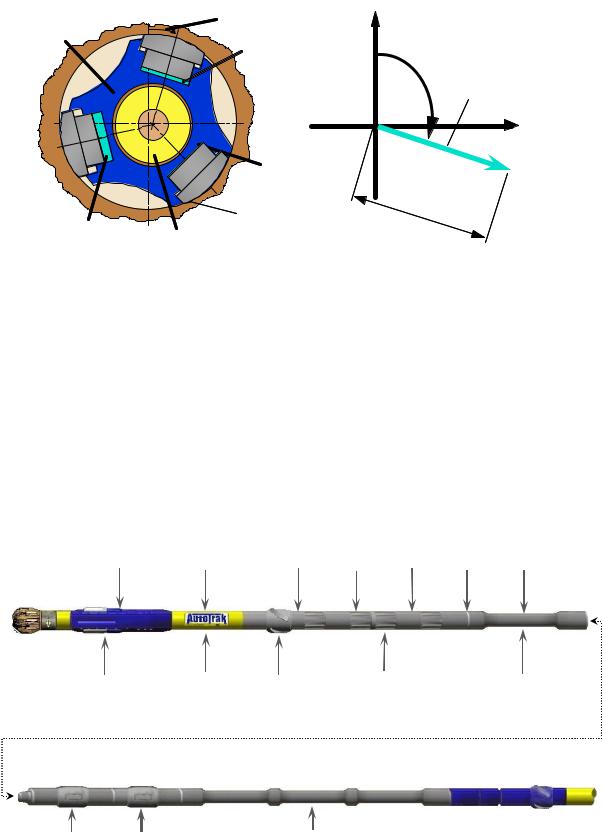
Принцип действия отклоняющего устройства приведен на рисунке 12.20 а. Отклоняющие опоры, управляемые независимо друг от друга при определенном выдвижении из корпуса, задаваемом электроникой, создают радиальное усилие к долоту с направлением и силой, соответствующей векторной сумме усилий на опорах (рис. 12.20 б).
44
293
vk.com/club152685050 | vk.com/id446425943
Корпус стабилизатораотклонителя
Опора 1
0 º |
|
0º |
Ориентация |
|
|
|
|
|
|
опоры |
|
|
Опора 2 |
Радиальное откло- |
|
|
няющее усилие |
|
|
к долоту |
|
Опора 3 |
|
|
Стенка |
|
|
скважины |
|
Приводной вал |
Сила |
|
а б Рис. 12.20. Принципиальная схема действия отклоняющего устройства
Система «Автотрак» включает в себя (рис. 12.21): невращаемый ста- билизатор-отклонитель 1, в котором размещаются датчики инклинометрии на долоте 2, опоры-отклонители 3; блок пульсатора/генератора 4, включающий в себя генератор 5, пульсатор 6, масляный насос 7; 213 мм стабилизатор 8; блок генератора-приемника 9, блок памяти 10, блок каротажа, сопротивления и гамма-каротажа 11; блок датчика вибрации 12; блок батарей 13, питающих телесистему при отсутствии или недостаточной подаче бурового раствора; короткую немагнитную УБТ 14; основной блок инклинометрии 15.
2 Инклинометрия на долоте |
5 Генератор |
9 Блок генера- |
10 Блок |
12 Блок |
13 Блок |
15 Основной блок |
3 Опоры-отклонители |
6 Пульсатор |
тор/приемник |
памяти |
вибрации |
батарей |
инклинометрии |
|
7 Масляный насос |
|
||||
|
|
|
|
|
||
20 Дополнительный забойный объемный двигатель
17 Модульный |
18 Модульный |
19 Немагнитная |
датчик плотности |
нейтронный дат- |
УБТ |
|
чик пористости |
|
Рис. 12.21. Схема компоновки «Автотрак»
45
294

vk.com/club152685050 | vk.com/id446425943
Кроме этого, могут быть включены в компоновку дополнительный блок каротажа 16, в который входят: модульный датчик плотности 17; модульный нейтронный датчик пористости 18.
Над телесистемой располагаются немагнитные УБТ.
РУС можно приводить во вращение не только ротором, но и забойным объемным двигателем 20 с большим крутящим моментом из соображений сохранения стенок обсадной колонны или сокращения энергозатрат.
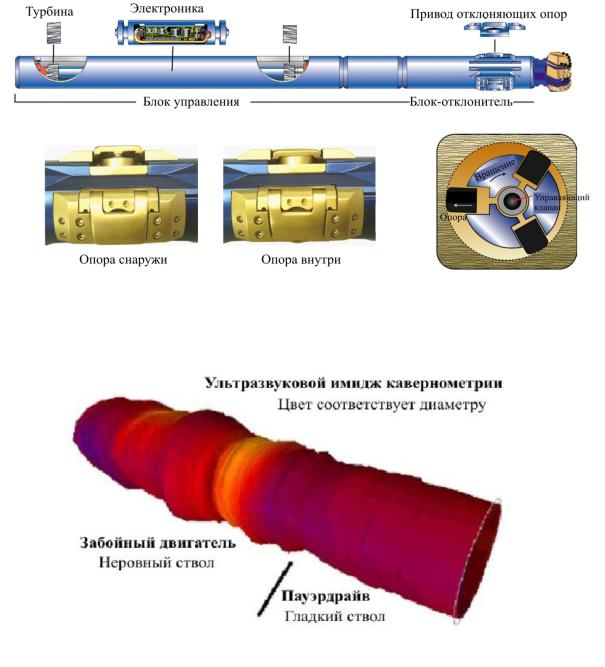
«ПАУЭРДРАЙВ» – «ШЛЮМБЕРЖЕ». Роторная управляемая система «Пауэрдрайв» компании «Шлюмберже» не имеет невращающихся элементов в своем составе, что значительно уменьшает вероятность прихвата в скважине, она компактна и имеет простую конструкцию. В ней сохранен принцип модульности, компоновка совместима с устройствами каротажа. В её состав входят блок-отклонитель, отклоняющий долото; переводник, соединяющий с блоком управления; стабилизатор; гибкое соединение между телесистемой и бурильной колонной (рис. 12.22).
Рис. 12.22. Система в сборе
В состав блока управления входят блок электроники, стабилизируемый в пространстве гироскопом; турбины генератора энергии; управляющий клапан. В блоке отклонителя встроена сложная гидравлическая система, управляемая электроникой, через центральный клапан приводящая в действие отклоняющие опоры. Синхронизированные с вращением компоновки отклоняющие опоры выходят из корпуса, смещая тем самым корпус системы и долото в противоположную сторону, и возвращаются в корпус, в то время как выдвигается следующая опора (рис. 12.23). Направление действия опор может быть любым, что позволяет проводить сложные трехмерные профили.
При бурении используется долото, вооруженное пластинами АТП, специально спроектированное для конкретных условий. Долота «Рид Хайкалог» диаметром от 114 до 464 мм имеют сложное строение ребер, агрессивное вооружение, малую высоту для интенсивного набора кривизны.
Минимальная микрокривизна значительно уменьшает трение о стенки скважины, что позволяет бурить с большим отходом от вертикали и спускать обсадные колонны на большую глубину. Спиральная выработка, столь характерная для шарошечных долот и турбинного бурения, значительно увеличивающая износ долот и площадь забоя скважины, имеет незначительный характер, хотя, как отмечают исследователи, часто
46
295
vk.com/club152685050 | vk.com/id446425943
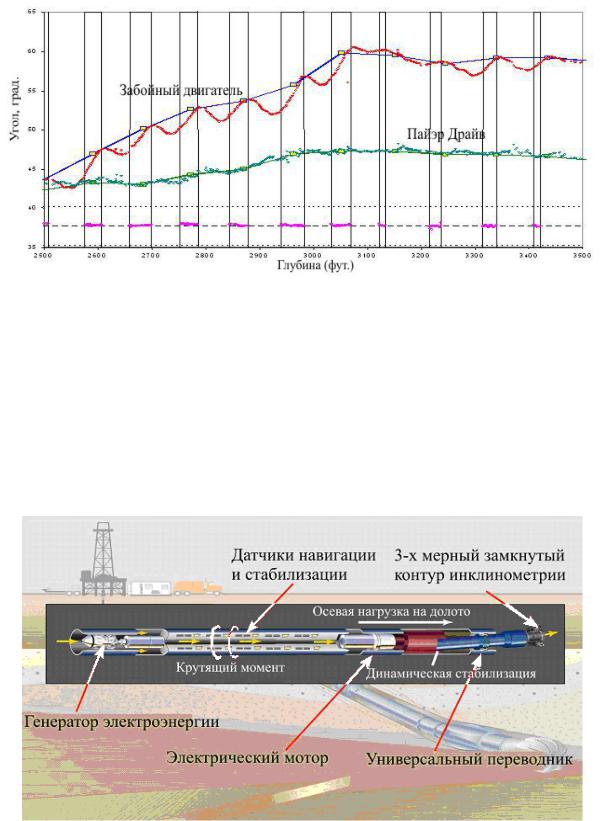
возникает при поликристаллическом вооружении долота. На рис. 12.24 трехмерный график кавернометрии показывает неровный с переменным диаметром ствол при бурении с обычным забойным двигателем и гладкий ствол при использовании «Пауэрдрайв».
Рис. 12.23. Элементы управления траекторией
Рис. 12.24. Состояние ствола скважины
На рисунке 12.25 представлено соответствие проектной и фактической траектории ствола скважины при бурении с забойным двигателем и рассматриваемой системой. Вверху – фактическая траектория компоновки с забойным двигателем – выделяются перегибы ствола при наборе и падении зенитного угла. Более сложный профиль получается при проводке трехмерного профиля с изменением зенитного угла и разворотом
47
296
vk.com/club152685050 | vk.com/id446425943
по азимуту. Внизу – траектория с «Пауэрдрайв», перегибы ствола малозначительны.
Рис. 12.25. Сравнение профилей при бурении с обычным забойным двигателем и «Пауэрдрайв»
На базе «Пауэрдрайв» «Шлюмберже» разрабатывается роторная управляемая система «Директ» с позиционированием долота (рис. 12.26). Компоновка вращается верхним приводом либо забойным двигателем. В корпусе устройства размещены: турбинный генератор электроэнергии, блок электроники содержит датчики геонавигации и стабилизации, электромотор, в универсальном переводнике помещен узел подшипников и герметизации, приводной вал долота.
Рис. 12.26. Система «Директ» в сборе
48
297
vk.com/club152685050 | vk.com/id446425943
В системе применяется динамическая стабилизация, то есть отклонение приводного вала от оси скважины синхронизировано с вращением бурильной колонны (рис. 12.27). Приводной вал, расположенный в подшипниках, отклоняется электромотором от оси скважины. В наддолотном переводнике встроены датчики инклинометрии, что позволяет динамически позиционировать долото. Система находится в стадии промышленных испытаний.
Рис. 12.27. Схема системы «Директ»
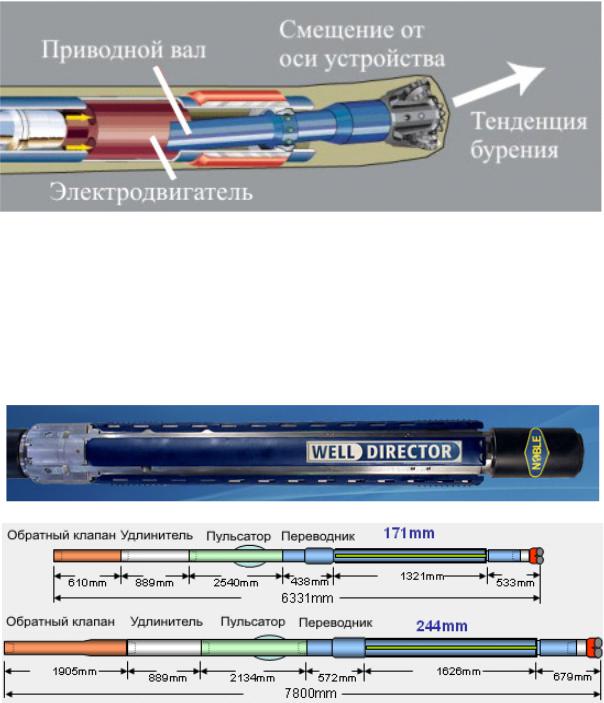
«ВЕЛЛДИРЕКТОР» – «НОБЛЬ ДРИЛЛИНГ». «Веллдиректор» является новой роторной управляемой системой, спроектированной для растущего количества высокотехнологичных скважин (рис. 12.28). Обеспечивает точный контроль траектории, увеличенную механическую скорость проходки и более гладкий, менее извилистый ствол скважины.
Рис. 12.28. Общий вид системы и конструкция «Веллдиректор»
49
298