Лекции от Чуфистова. 1 часть / lecture_tmm
.docТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Теория механизмов и машин – это наука, рассматривающая вопросы анализа и синтеза механизмов и машин.
Механизм- система взаимосвязанных твердых тел, которая при заданном законе движения одних тел обеспечивает закон движения других тел.
Машина – один или несколько механизмов, снабженных системой управления и предназначенных для преобразования законов движения, энергии, информации и др. с целью замены физического или умственного труда человека.
Машины (механизмы) состоят из деталей.
Деталь- часть машины, полученная без применения сборочных операций.
Звено- это одна или несколько деталей, соединенных неподвижно (жестко).
В механизме имеется одно неподвижное звено- стойка и несколько подвижных звеньев. Звенья соединяются между собой с помощью кинематических пар.
Кинематическая пара - подвижное соединение двух звеньев.
Классификация кинематических пар
В пространстве любое тело имеет 6 степеней свободы (W), т.е. может совершать 6 независимых движений: 3 поступательных вдоль выбранных осей и 3 вращательных вокруг этих же осей. Величины соответствующих перемещений называют обобщенными координатами. Если такое тело связать с другим телом посредством кинематической пары, то это уменьшит его число степеней свободы на число наложенных связей (S), налагаемых другим телом. Число связей определяется видом кинематической пары. Значит, справедлива запись:
W+S=6
Классификация кинематических пар проводится по числу наложенных связей:
S=1, W=5 – кинематическая пара 1 класса
S=2, W=4 – кинематическая пара 2 класса
S=3, W=3 – кинематическая пара 3 класса
S=4, W=2 – кинематическая пара 4 класса
S=5, W=1 – кинематическая пара 5 класса
Более наглядно эту классификацию можно представить в виде таблицы:
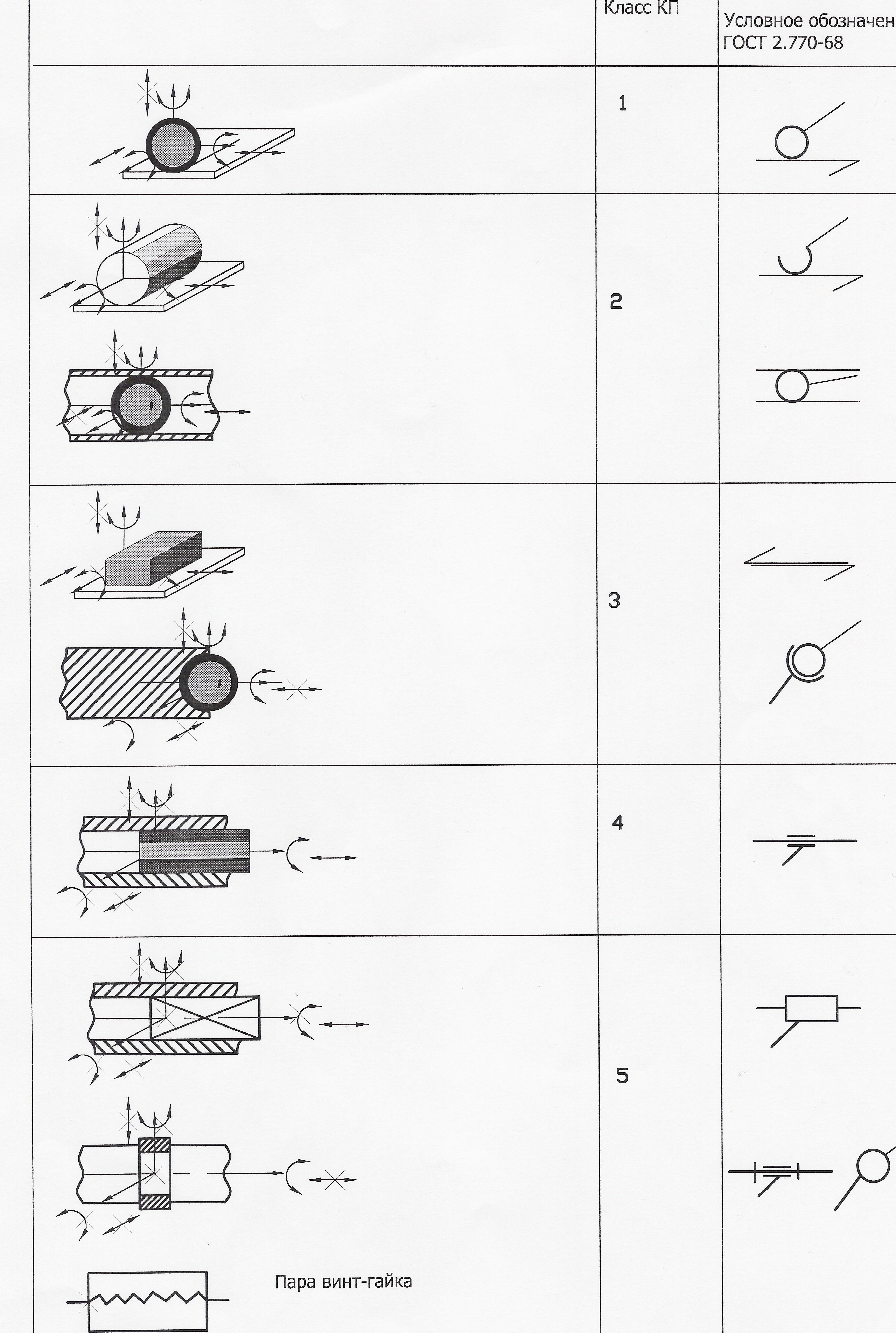
Кинематические пары, в которых касание происходит по точке или линии называются высшими кинематическими парами. К ним относятся кинематические пары 1-ого и 2-ого классов. Остальные же (кинематические пары 3-его, 4-ого и 5-ого классов) являются низшими.
Классификация звеньев
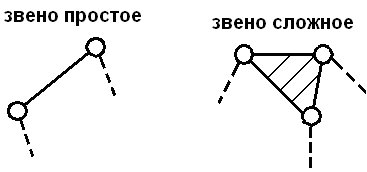
Звенья бывают простые и сложные, также подвижные и неподвижные. Неподвижное звено это стойка, а к подвижным относятся - все остальные звенья.
По закону вращения звенья делятся на:
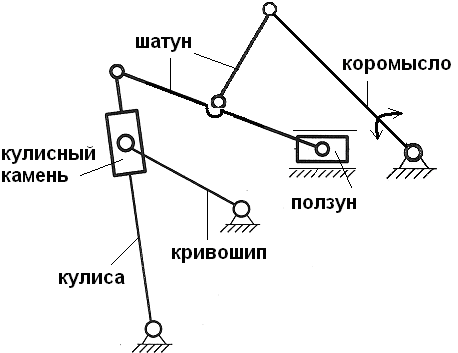
1. Кривошип- звено, имеющее общую кинематическую пару со стойкой и совершающее полный оборот вокруг своей оси.
2. Коромысло- звено, имеющее общую кинематическую пару со стойкой и не совершающее полный оборот вокруг своей оси.
3. Ползун- звено, имеющее общую кинематическую пару со стойкой и совершающее прямолинейное возвратно-поступательное движение.
4. Шатун- звено, не имеющее общих кинематических пар со стойкой и совершающее сложное плоскопараллельное движение.
5. Кулиса- звено, совершающее вращательное движение и несущее на себе другое звено, называемое кулисным камнем.
6. Кулисный камень
Звенья, соединенные с помощью кинематических пар, образуют кинематическую цепь.
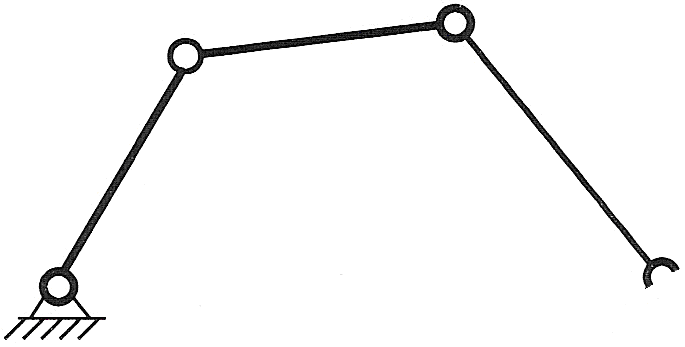
кинематическая цепь, присоединенная к стойке (незамкнутая кинематическая цепь):
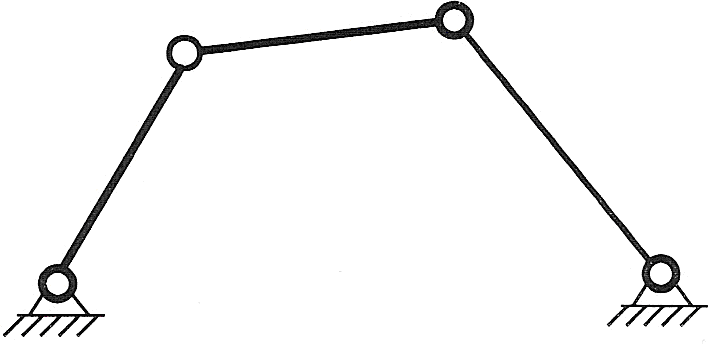
кинематическая цепь, присоединенная к двум стойкам (замкнутая кинематическая цепь):
Механизм - кинематическая цепь, присоединенная к стойке.
Сложный механизм – механизм, который включает в себя сложное звено.
Пространственные и плоские механизмы
Пространственные механизмы - это те, звенья которых совершают движение в пространстве, а плоские - это те, звенья которых совершают движение в одной или нескольких параллельных плоскостях.
Формула А. П. Малышева для пространственных механизмов
Важнейшей характеристикой кинематической цепи является число степеней свободы.
Пусть кинематическая цепь содержит n звеньев. До того как они были соединены посредством кинематических пар, система из n звеньев имела 6n степеней свободы. Каждая кинематическая пара m класса дает m уравнений связей относительно координат. Разность между числом степеней свободы и числом уравнений связей дает число независимых координат - степеней подвижности механизма:
W= 6n - 1P1 - 2P2 - 3P3 - 4P4 - 5P5.
где n - число подвижных звеньев;
6n- общее число степеней свободы всех звеньев;
P1, P2, P3, Р4 , P5 – число кинематических пар от 1 до 5 класса;
W- степень подвижности механизма.
Формула П. Л. Чебышева для плоских механизмов
Для плоского механизма используется формула Чебышева:
W=3n-1P4-2P5
где n-число подвижных звеньев
P4,P5-кинематические пары с одной и с двумя наложенными связями.
По-другому эту формулу можно записать в следующем виде:
W=3n-2Pн-Pв
где n-общее число подвижных звеньев механизма
Рн - число низших кинематических пар
Рв – число высших кинематических пар
Структурный анализ механизма
План анализа:
-
Определение степени подвижности механизма (W-?)
-
Разбиение на структурные группы и определение их класса и порядка.
-
Запись формулы строения механизма.
Любой механизм (без избыточных связей) состоит из одного (нескольких) начальных механизмов и структурных групп.
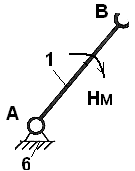
Начальным звеном может быть объявлено любое звено, имеющее общую кинематическую пару со стойкой. Начальное звено обозначают стрелкой.
Под начальным механизмом понимают совокупность выбранного начального звена, стойки и соединяющей их кинематической пары.
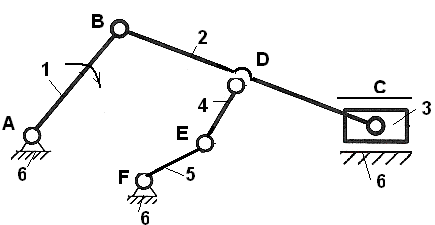
На данном рисунке:
W=3![]() 5-2
5-2![]() 7-0=1
7-0=1
Степень подвижности равна 1.
Каждый механизм с W=1 можно рассматривать состоящим из механизма 1-го класса и присоединенных к нему структурных групп.
Под механизмом 1-го класса понимается начальное звено со стойкой. Механизм 1-го класса имеет W=1.
Структурная группа Асура
Структурной группой (группой Асура) называется такая группа звеньев, степень подвижности которой равна 0.
Кинематическая цепь - это система звеньев, образующих между собой кинематические пары.
-
Пусть Pв=0
тогда W=3n-2P=0
|
N |
Pн |
|
2 |
3 |
|
4 |
6 |
|
6 |
9 |
3n=2Pн
2) Если Pв есть, то заменяем высшие кинематические пары на низшие.
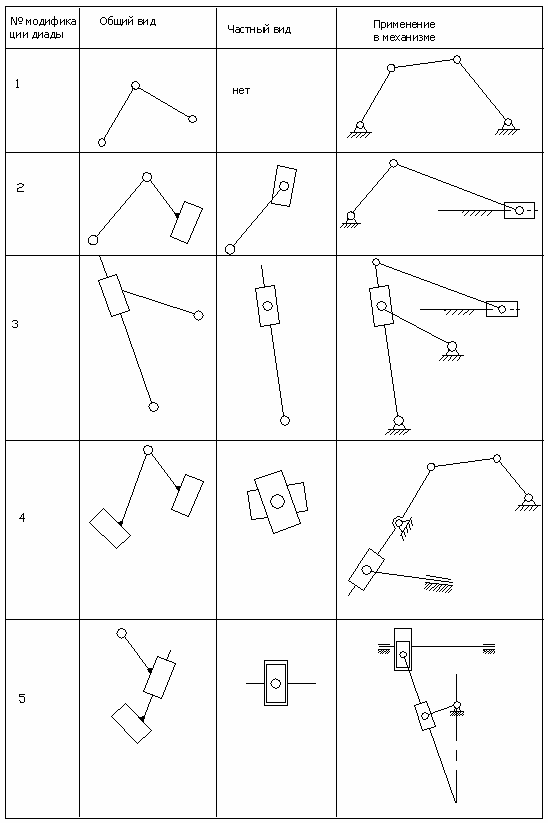
Модификация диад и их применение в механизмах
Диада содержит два звена и три кинематические пары. Известно пять модификаций диады, которые приведены на рисунке, расположенном ниже.
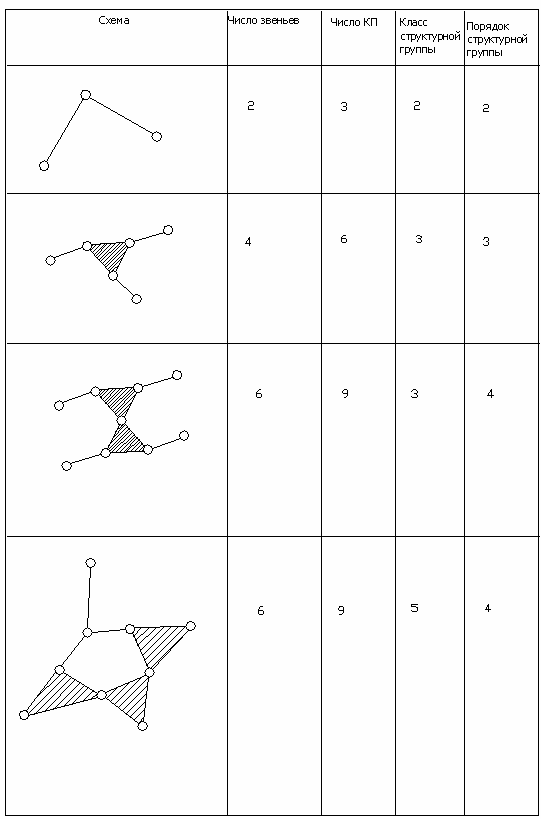
Но существуют структурные группы, которые не делятся на более мелкие. В этом случае определяется класс и порядок структурной группы и ее называют в соответствии с этими данными. Класс структурной группы определяется числом кинематических пар, входящих в наиболее сложный замкнутый контур, порядок- числом внешних кинематических пар.
Правила синтеза и анализа механизмов:
-
Структурная группа присоединяется к условному механизму внешними кинематическими парами.
-
Нельзя присоединять структурную группу к одному звену.
-
При присоединении или отсоединении структурных групп, степень подвижности меняться не должна.
-
Звенья нумеруются арабскими цифрами, начиная с начального механизма и по степени усложнения механизма.
-
Кинематические пары нумеруются латинским шрифтом, начиная с кинематической пары начального механизма.
Пример на анализ
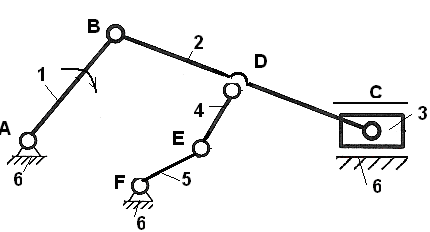
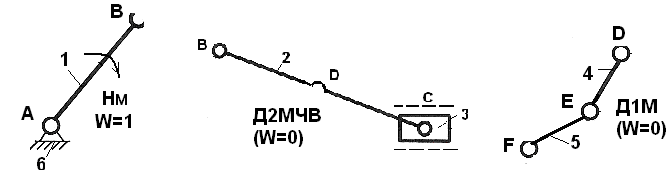
W=3n-2Рн-Рв
2. n=5; Рн=7; Рв=0
W=3·5-2·7-0=1
3. Формула строения механизма:
НМ+Д1М=Д2МЧВ
Пример на синтез
Под синтезом понимается проектирование механизма. Синтез представляет задачу обратную анализу. Н.М.+Д1М+Д4МЧВ+Д5М4В+Д2МЧВ+Н.М
Формула данного вида называется формулой строения.
По ней можно построить структурную схему механизма.
Где:
Н.М.- начальный механизм.
Д1М- диада 1-ой модификации
Д4МЧВ- диада 4-й модификации частного вида.
Д5МЧВ- диада 5-ой модификации частного вида.
Д2МЧВ- диада 2-ой модификации частного вида.
Избыточные или повторно наложенные связи механизма
Иногда при определенных длинах звеньев, наборе кинематических пар и их взаимном расположении одна или несколько кинематических пар отнимают у какого либо звена движение. В этом случае имеет место избыточная или повторная связь
Для избыточных связей вводится q.
Формула Малышева
W= 6n- 1P1-2P2-3P3-4P4-5P5+q
Формула Чебышева
W= 3n-2Pн-Pв+q
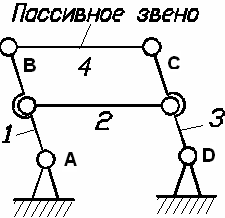
При определении W необходимо учитывать возможность наличия так называемых «пассивных» звеньев, т.е. звеньев, устраняемых без формального ущерба для кинематики анализируемого механизма (рис.8).
а) W=3·4-2·6-0=0 – с пассивным звеном,
б) W=3·3-2·4-0=1 – фактически.
Кинематическое исследование рычажных механизмов
Механизмы с низшими парами находят широкое применение в технике. Их принято называть рычажными.
S=f1(t)
V=f2(t)
A=f3(t)
Существует три метода исследований:
-
Аналитический
-
Эксперимент
-
Графо-аналитический
Понятие о масштабном коэффициенте
Масштабный коэффициент (μ)- это величина равная отношению какой-либо величины в системе СИ к отрезку, обозначающему эту величину на чертеже.
Например: