

5.4. Расчёт времени переходных процессов при силовом спуске холостого гака
.1. момент на валу двигателя при силовом спуске холостого гака
М![]() =
( G
*R
)
* ( 2 – 1 / η
) / 2 ι = ( 320*0,25) ( 2 – 1 / 0,1 ) / 33 = - 19,4 Н*м,
=
( G
*R
)
* ( 2 – 1 / η
) / 2 ι = ( 320*0,25) ( 2 – 1 / 0,1 ) / 33 = - 19,4 Н*м,
где: η = 0,1 – кпд передачи при G / G = 320 / 28500 = 0,01
( см. рис.1 Приложения ); знак «минус» объясняется тем, что при силовом спуске двигателя его момент имеет противоположное направление по отношению к направлению при подъеме груза ( двигатель работает в 3-м квадранте в системе координат ω ( М ), принятой для изображения механических характеристик электродвигателей и исполнительных механизмов );
2. угловая скорость ω при М = - 19,4 Н*м ( в формулу подставляется абсолютное значение момента М , т.е. принимается М = 19,4 Н*м ) находится из сллтношения
( ω - ω ) / ( ω - ω ) = М / М , или в числах ( 104,6 – 94,2 ) / ( 104,6 –
ω ) = 339 / 19,4, откуда ω = 104 с-1
.3. время разгона двигателя при спуске холостого гака
t![]() =
(Ј
*
ω
) / ( М
-
М
)
= ( 1,8*104 ) / ( 339 - 19,4 ) = 0,58 с
=
(Ј
*
ω
) / ( М
-
М
)
= ( 1,8*104 ) / ( 339 - 19,4 ) = 0,58 с
.4. тормозной момент при отключении двигателя от сети в конце спуска
холостого гака
М![]() =
М
+
М
+
М
=
300 + 45,1 + 19,4 = 364,5 Н*м
=
М
+
М
+
М
=
300 + 45,1 + 19,4 = 364,5 Н*м
.5. время торможения поднимаемого гака
t = ( Ј * ω ) / М = ( 1,8*104 ) / 364,5 = 0,51 с
.6. скорость спуска холостого гака
ν![]() =(
ω
*
R
)
/ ι = ( 104*0,25 ) / 33 = 0,78 м/с
=(
ω
*
R
)
/ ι = ( 104*0,25 ) / 33 = 0,78 м/с
.7. путь гака при разгоне и торможении
Н![]() =
0,5 ν
/
( t
+
t
)
= 0,5*0,78 / ( 0,58 + 0,51 ) = 0,35 м
=
0,5 ν
/
( t
+
t
)
= 0,5*0,78 / ( 0,58 + 0,51 ) = 0,35 м
.9. время подъёма гака с постоянной скоростью
t![]() =
( Н - Н
)
/ ν
=
( 12 – 0,35 ) / 0,78 = 14,9 с
=
( Н - Н
)
/ ν
=
( 12 – 0,35 ) / 0,78 = 14,9 с
.10. ток двигателя при подъёме холостого гака
 I
=
I
(
М
/
М
)
= 70 ( 19,4 / 339 ) = 4,0 А
I
=
I
(
М
/
М
)
= 70 ( 19,4 / 339 ) = 4,0 А
.5. построение нагрузочной диаграммы I ( t )
.1. Результаты расчёта, полученные в пп. 3.1., 3.2., 3.3. и 3.4., сведём в таблицу 2.
Таблица 2. Исходные данные для построения нагрузочной диаграммы
-
№№
Режимы работы
Ток, А
Время, с
Подъём номинального груза
1.
Пуск
I = 340
t
 =
0,44
=
0,44
2.
Установившийся режим
I = 62,5
t = 15,5
3.
Торможение
t = 0,45
Горизонтальное перемещение груза
t
 =
20
=
20Тормозной спуск груза
1.
Пуск
I = 340
t = 0,27
2.
Установившийся режим
I = 14
t = 14,5
3.
Торможение
t = 0,77
Отстропка груза
t
 =
60
=
60Подъём холостого гака
1.
Пуск
I = 340
t = 0,27
2.
Установившийся режим
I = 5
t = 14,7
3.
Торможение
t = 0,5
Горизонтальное перемещение груза
t
 =
20
=
20Спуск холостого гака
1.
Пуск
I = 340
t = 0,58
2.
Установившийся режим
I4 = 4
t = 14,9
3.
Торможение
t = 0,51
4.
Застропка груза
t
 =
60
=
60
График нагрузочной диаграммы изображён на рис.2
На этом графике промежутки времени t , t , t и t - рабочие, когда двигатель включен, а промежутки времени t ', t ', t ' и t ' – нерабочие, двигатель отключён. При этом :
t = t + t = 0,44 + 15,5 = 15,94 ≈ 16 с
 t
'
= t
+
t
=
0,45 + 20 = 20,45 ≈ 20 с
t
'
= t
+
t
=
0,45 + 20 = 20,45 ≈ 20 с
t = t + t = 0,27 + 14,5 = 14,77 ≈ 15 с
t ' = t + t = 0,77 + 60 ≈ 61 с
t = t + t = 0,27 + 14,7 ≈ 15 с
t ' = t + t = 0,5 + 20 = 20,5 ≈ 20 с
t = t + t = 0,58 + 14,9 = 15,48 ≈ 15,5 с
t ' = t + t = 0,51 + 60 = 60,5 с
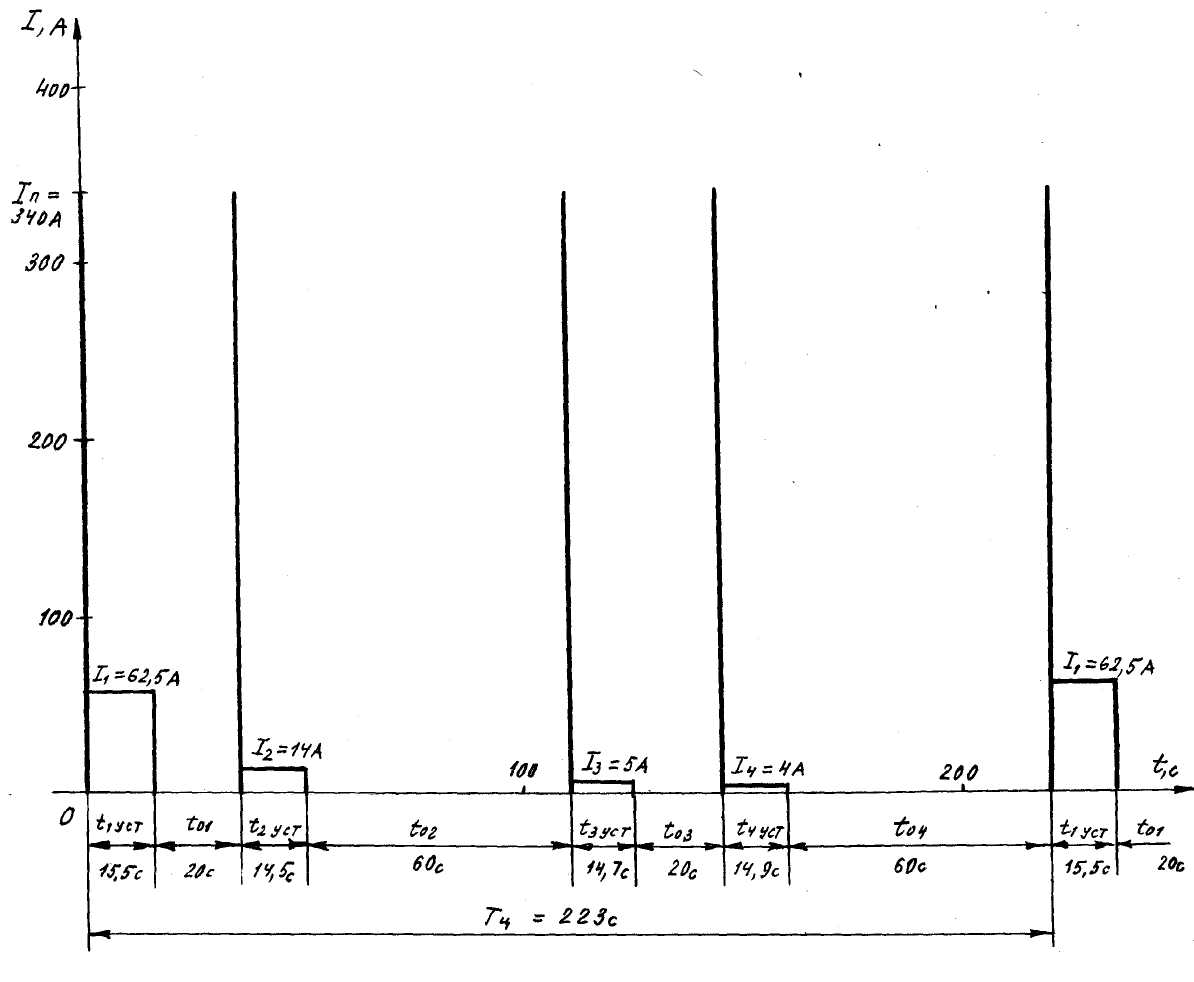
Рис.2. Нагрузочная диаграмма электропривода лебедки
Примечание: даграмма строится на отдельном листе обычной бумаги или на
«миллиметровке» со штампом ( ХМК.5.092219.КП.САЭП.345-А.019 )