

5.2. Расчёт времени переходных процессов при тормозном спуске груза
.1. угловая скорость ω при моменте М = 66,7 Н*м находится из соот-
ношения
( ω - ω )/ ( ω - ω ) = М / М ,
где ω = 2πf / р = 2*3,14*50 / 3 = 314 / 3 = 104,6 с-1
( р = 3 – число пар полюсов обмотки 3-й скорости, таблица 1, колонка 3, в которой число полюсов 2р = 6 ),
ω = 2 π* n / 60 = 2*3,14*900 / 60 = 94,2 с –1 ( n = 900 об / мин – номиналь-
ная частота вращения двигателя на 3-й скорости – см. таблицу 1. );
или, в числах
( 104,6 – 94,2 ) / ( 104,6 – ω ) = 339 / 66,7,
откуда 10,4 / ( 104,6 - ω ) = 5.
Разделим обе части на число «5»: 2,08 / ( 104,6 - ω ) = 1,
откуда окончательно 2,08 = 104,6 - ω , или ω = 104,6 – 2,08 = 102,52 с-1 ;
.2. угловая скорость рекуперативного спуска
ω![]() =
2 ω
-
ω
=
209,2 – 102,52 = 106,8 рад/с
=
2 ω
-
ω
=
209,2 – 102,52 = 106,8 рад/с
.3. время пуска двигателя при опускании груза
t![]() =(
Ј
*
ω
)
/ ( М
+
М
) = ( 2,0*106,8 ) / ( 730 + 66,7 ) = 0,27 с
=(
Ј
*
ω
)
/ ( М
+
М
) = ( 2,0*106,8 ) / ( 730 + 66,7 ) = 0,27 с
.4. тормозной момент при отключении двигателя от сети
М![]() =
М
+
М
-
М
=
300 + 45,1 - 66,7 = 278,4 Н*м
=
М
+
М
-
М
=
300 + 45,1 - 66,7 = 278,4 Н*м
( знак «минус» при М объясняется тем, что при тормозном спуске груза
статический момент М является движущим, а не тормозным )
.7. время остановки опускаемого груза
t = (Ј * ω ) / М = ( 2,0*106,8 ) / 278,4 = 0,77 с
.8. скорость опускания груза
ν = ( ω * R ) / ι = ( 106,8*0,25 ) / 33 = 0,8 м/с
.9. путь, пройденный грузом при разгоне и торможении
Н![]() =
0,5 ν
(
t
+
t
)
= 0,5*0,8 ( 0,27 + 0,77 ) = 0,416 ≈ 0,42 м
=
0,5 ν
(
t
+
t
)
= 0,5*0,8 ( 0,27 + 0,77 ) = 0,416 ≈ 0,42 м
.10. время опускания груза в установившемся режиме
t![]() =
( Н - Н
)
/ ν
=
( 12- 0,42 ) / 0,8 = 14,475 ≈ 14,5 с
=
( Н - Н
)
/ ν
=
( 12- 0,42 ) / 0,8 = 14,475 ≈ 14,5 с
.11. ток, потребляемый двигателем при тормозном спуске
I = I *( М / М ) = 70*66,7 / 339 = 13,77 ≈ 14 А
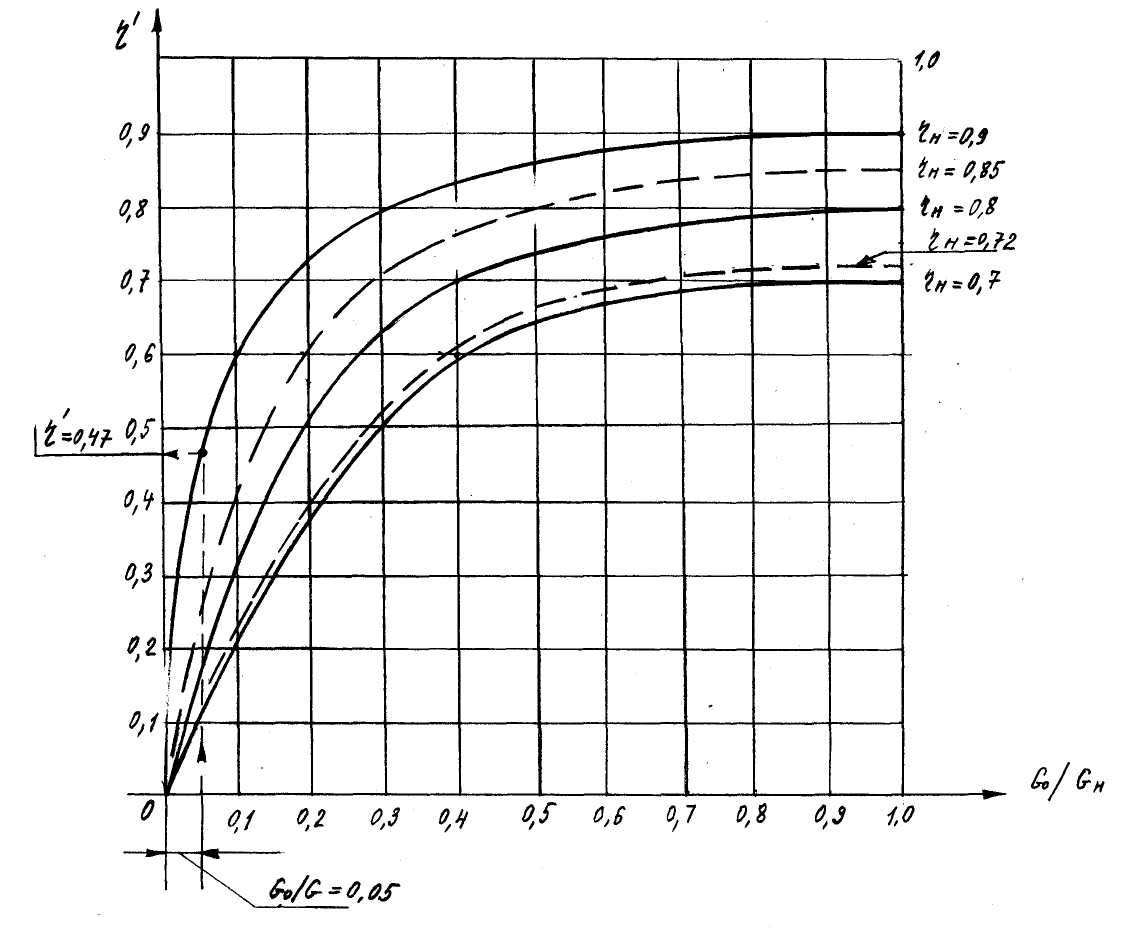
Рис.1. Зависимость коэффициента полезного действия передачи η '
( редуктора ) от отношения веса холостого
гака G![]() к номинальной грузо-
к номинальной грузо-
подъемности лебедки G![]() ( в данном примере G
/
G
=
320 / 28500 ≈ 0,01 ).
( в данном примере G
/
G
=
320 / 28500 ≈ 0,01 ).
Графиком пользуются так:
из исходных данных выписывают номинальное значение КПД передачи
( в данном примере η = 0,72 );
на рис. 1 нет сплошной кривой, которой соостветствует к η = 0,72 ,
поэтому на рис.1 находят графике кривую с ближайшим к η = 0,72 ;значением – это кривая с η = 0,7 ( самая нижняя );
самостоятельно апроксимируют кривую с η = 0,7 в кривую с η = 0,72
( она показана пунктиром выше кривую с η = 0,7 );
по известному значению G / G и кривой с η = 0,72 находят значение
КПД η ' = 0,01.
Этот график применяют для расчета времени переходных процессов при перемещении холостого гака ( подъеме и спуске ).
Расчёт времени переходных процессов при подъёме холостого гака
.1. момент на валу двигателя при подъёме холостого гака
М![]() =
( G
*R
)
/ ( ι*η
) = ( 320*0,25 ) / ( 33*0,1 ) = 24,2 Н*м,
=
( G
*R
)
/ ( ι*η
) = ( 320*0,25 ) / ( 33*0,1 ) = 24,2 Н*м,
где: η = 0,1 – кпд передачи при G / G = 320 / 28500 = 0,01
( см. рис.1 )
.2. угловая скорость при М = 24,2 Н*м
 (
ω
-
ω
/
( ω
-
ω
)
= М
/
М
,
или в числах ( 104,6 – 94,2 ) / (
104,6 - - ω
)
= 339 / 24,2, откуда ω
=
103,8 рад/с
(
ω
-
ω
/
( ω
-
ω
)
= М
/
М
,
или в числах ( 104,6 – 94,2 ) / (
104,6 - - ω
)
= 339 / 24,2, откуда ω
=
103,8 рад/с
.3. Приведенный к валу двигателя момент инерции ротора электродвигателя и вращающихся частей редуктора
Ј![]() =
к* Ј
=
1,2*1,5 = 1,8 кг*м
=
к* Ј
=
1,2*1,5 = 1,8 кг*м
.4. время разгона двигателя при подъёме холостого гака
t![]() =
(Ј
*
ω
)
/ ( М
-
М
)
= ( 1,8*103,8 ) / ( 730 – 24,2 ) = 0,27 с
=
(Ј
*
ω
)
/ ( М
-
М
)
= ( 1,8*103,8 ) / ( 730 – 24,2 ) = 0,27 с
.5. тормозной момент при отключении двигателя от сети в конце подъёма гака
М![]() =
М
+
М
+
М
=
300 + 45,1 + 24,2 = 369 Н*м
=
М
+
М
+
М
=
300 + 45,1 + 24,2 = 369 Н*м
.6. время торможения поднимаемого гака
t = ( Ј * ω ) / М = ( 1,8*103,8 ) / 369 = 0,5 с
.7. скорость подъёма холостого гака
ν =( ω * R ) / ι = ( 103,8*0,25 ) / 33 = 0,78 м/с
.8. путь гака при разгоне и торможении
Н![]() =
0,5 ν
(
t
+
t
)
= 0,5*0,78 / ( 0,27 + 0,5 ) = 0,5 м
=
0,5 ν
(
t
+
t
)
= 0,5*0,78 / ( 0,27 + 0,5 ) = 0,5 м
.9. время подъёма гака с постоянной скоростью
t![]() =
( Н - Н
)
/ ν
=
( 12- 0,5 ) / 0,78 = 14,7 с
=
( Н - Н
)
/ ν
=
( 12- 0,5 ) / 0,78 = 14,7 с
.10. ток двигателя при подъёме холостого гака
I = I ( М / М ) = 70 ( 24,2 / 339 ) = 5 А